

Что такое Freebody?
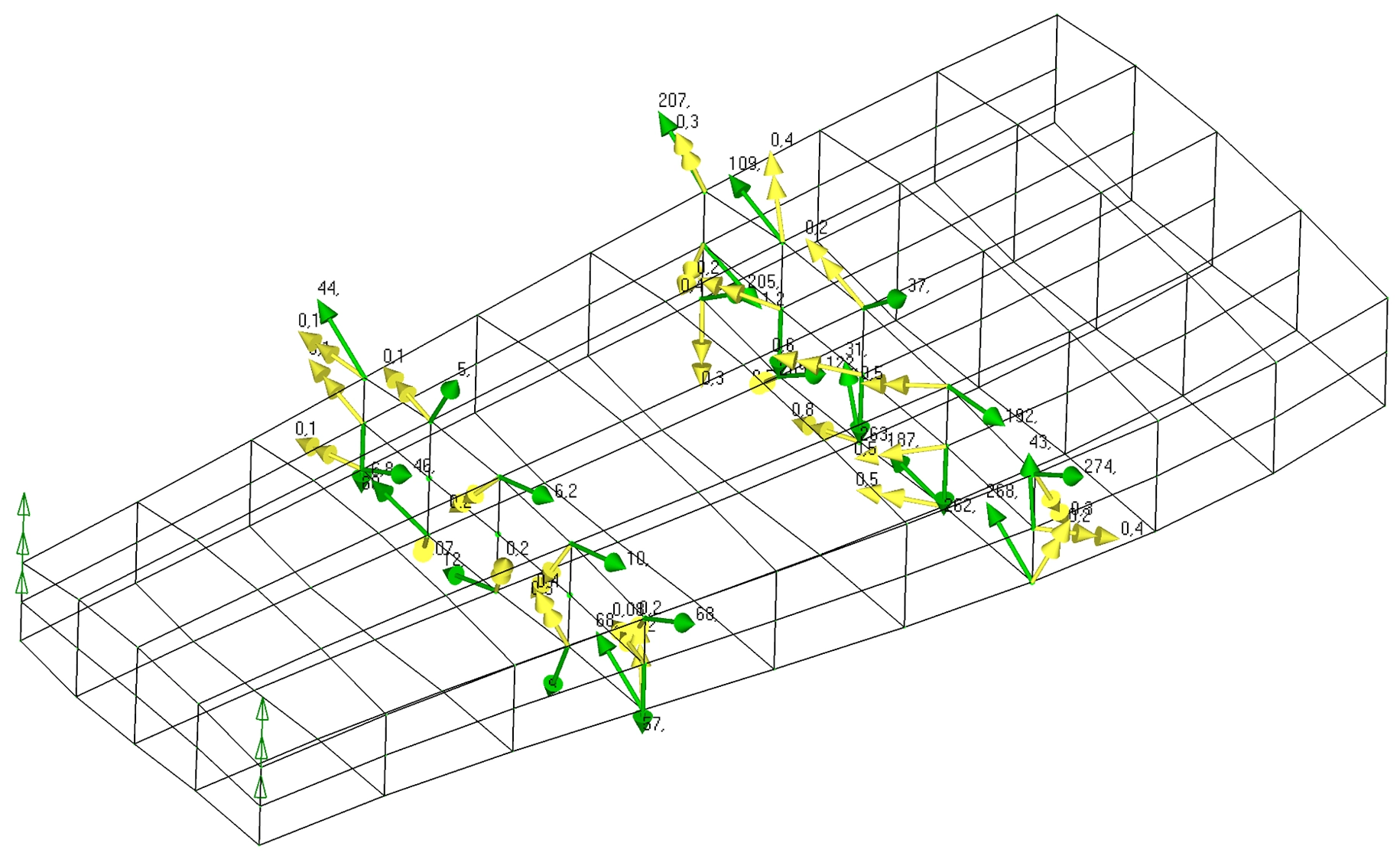
ИнструментыFreebodyпозволяют визуализировать узловые силы и моменты, которые являются результатом воздействия со стороны окружающих конечных элементов.
В FEMAP, Freebodyможно использовать для:
- проверки заданных нагрузок и закреплений (вывод реакций);
- визуализации контактных узловых сил (контакт типа GluedилиContact);
- вывода сил и моментов в узлах конечных элементов, в том числе и RBE;
- полезно, если сетка не позволяет точно анализировать напряжения в конструкции. Вы можете вывести суммарные силы и моменты, например, в опасном сечении для расчета напряжений по формулам сопротивления материалов;
- используется при переходе от глобальной модели к локальной. В данном случае локальная модель будет самоуравновешена с помощью Freebody.
Наибольшее практическое применение Freebody получили в аэрокосмической отрасли, но также активно используются при решении различного рода задач.
Вывод узловых сил (Grid Point Force) в NASTRAN
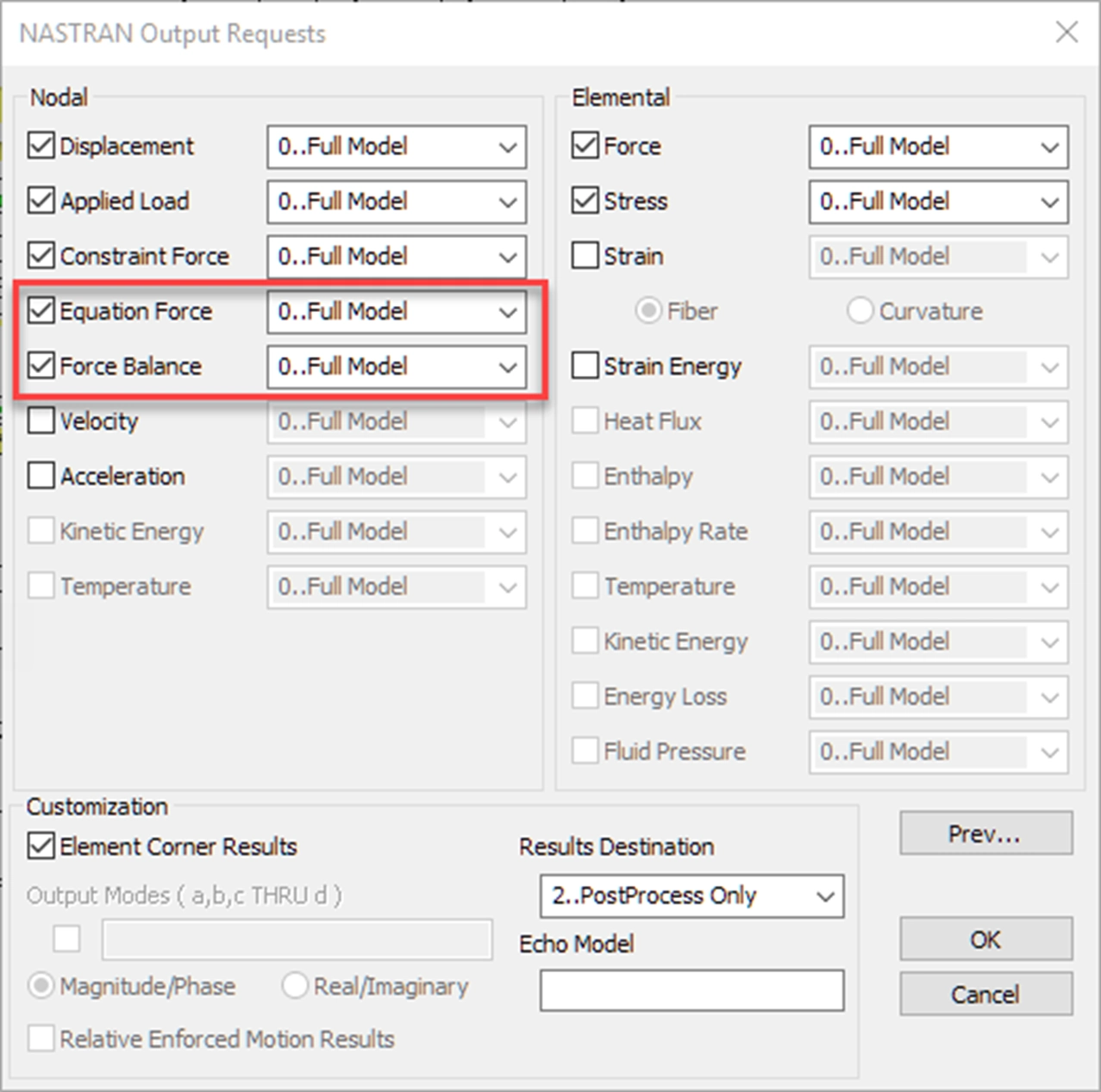
Для вывода узловых сил и моментов (GPFORCE) необходимо включить опцию Force Balance в настройках NASTRAN Output Requests.
- Analysis Manager
- Master Requests and Conditions
- Output Requests
- Force Balance
По умолчанию, эта опция выключена, так как GPFORCE может содержать большое количество данных и заметно увеличить размер файла результатов.
Для вывода сил и моментов в узлах RBE необходимо активировать опцию Equation Force, так как данные типы элементов только формально являются элементами – по своей сути, это уравнения связей.
Просмотр GPFORCE через файл F06
Если в настройках вывода результатов NASTRAN Output Requests в разделе Result Destination установлена опция Print Only или Print and PostProcess, тогда данные по узловым силам и моментам можно просмотреть в файле F06.
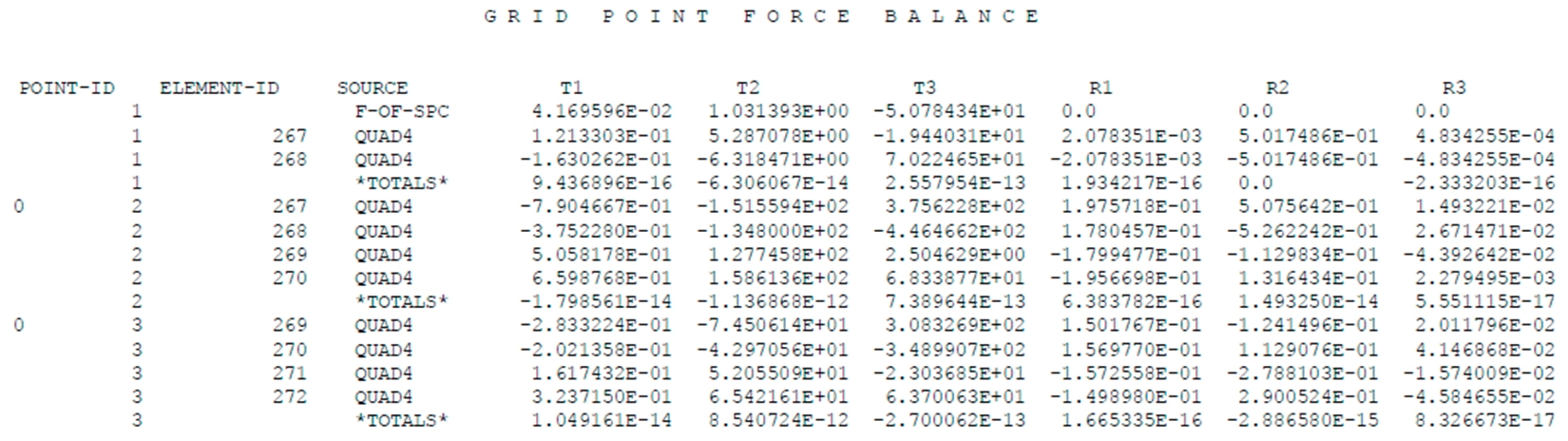
Найдите таблицу с названием «G R I D P O I N T F O R C E B A L A N C E»
Просмотр GPFORCE через файл F06
Результаты GPFORCE перечислены в таблице и включают в себя узловые силы Fxyz (T1, T2, T3) и моменты Mxyz (R1, R2, R3).
- Результаты разделены на четыре категории, плюс суммирование:
- Элементные (силы/моменты в узле со стороны каждого конечного элемента);
- Приложенные нагрузки (общие силы/моменты, приложенные к узлу; единственное значение на узел);
- F-of-SPC (силы/моменты в закреплениях; единственное значение на узел);
- F-of-MPC (силы/моменты в уравнениях связи и RBE; единственное значение на узел);
- *TOTALS* (суммирование всех вкладов; одно значение на узел);
- для большинства случаев это значение должно быть близко к нулю, учитывая равновесие в узле.
Выходные значение Freebody могут сильно зависеть от выбранных наборов узлов и элементов. Определение того, какие узлы и элементы должны использоваться, зависит от того, как модель была идеализирована.
Freebodyв FEMAP
Наборы узлов и элементов Freebody сохраняются в модели FEMAP
Это ускоряет процесс анализа ошибок при пересчете
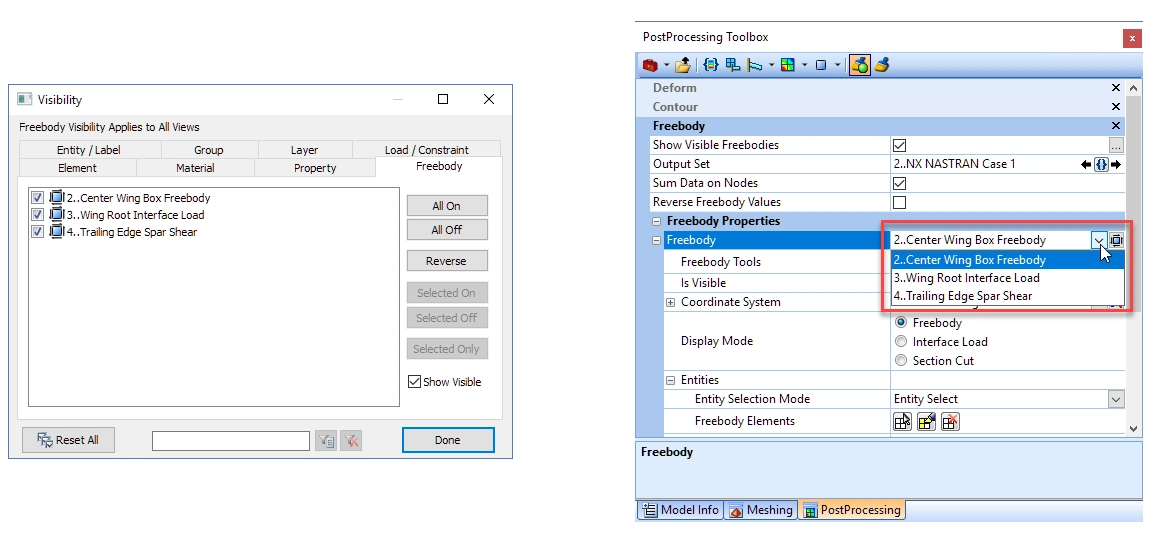
Одновременно может отображаться любое количество Freebody
Существует множество инструментов для автоматизации задач, связанных Freebody, таких как создание нагрузок и фрагментация конструкций.
В FEMAP существует три отдельных режима отображения Freebody:
1. Freebody - пользователь выбирает элементы, FEMAP автоматически выбирает связанные узлы. Предназначен для отображения сбалансированного набора нагрузок на локальную часть модели.
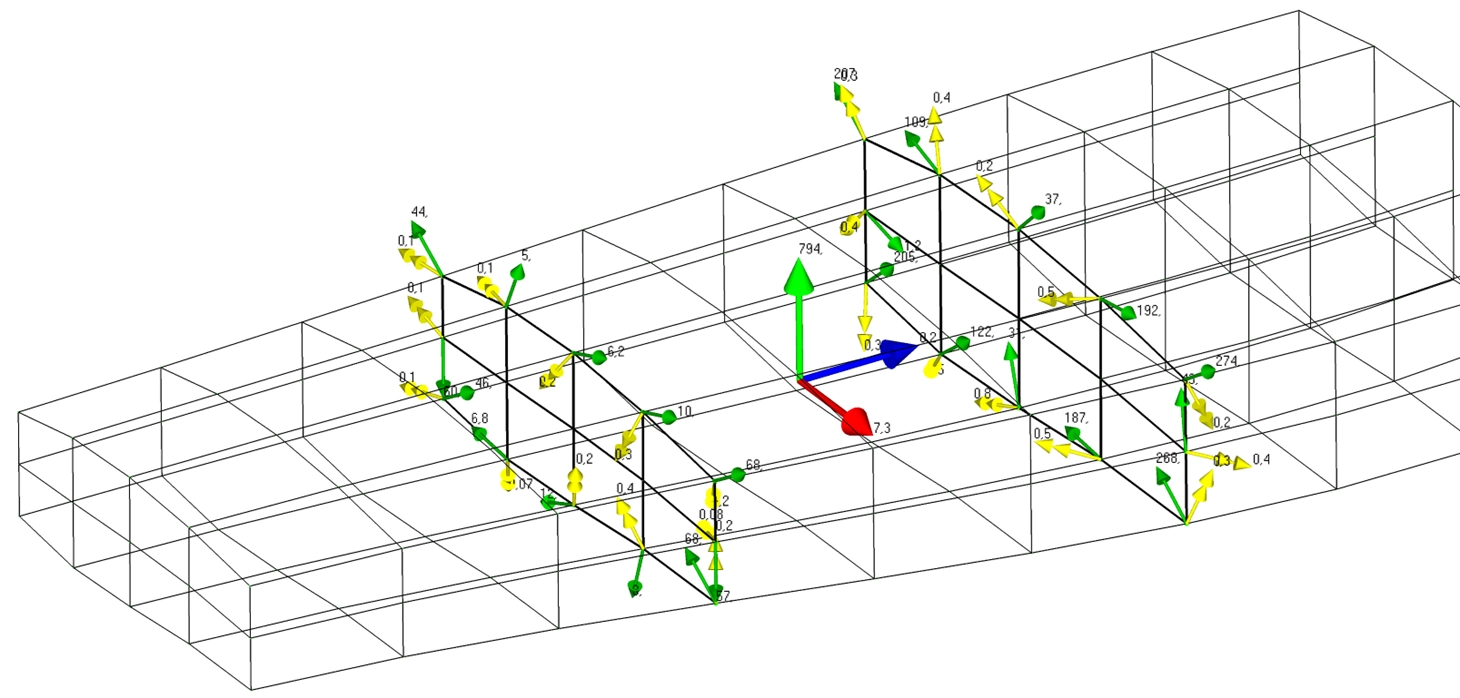
2. Interface Load - пользователь выбирает и узлы, и элементы и FEMAP вычисляет сумму сил и моментов по всему набору и отображает Freebody в виде одного суммарного вектора.
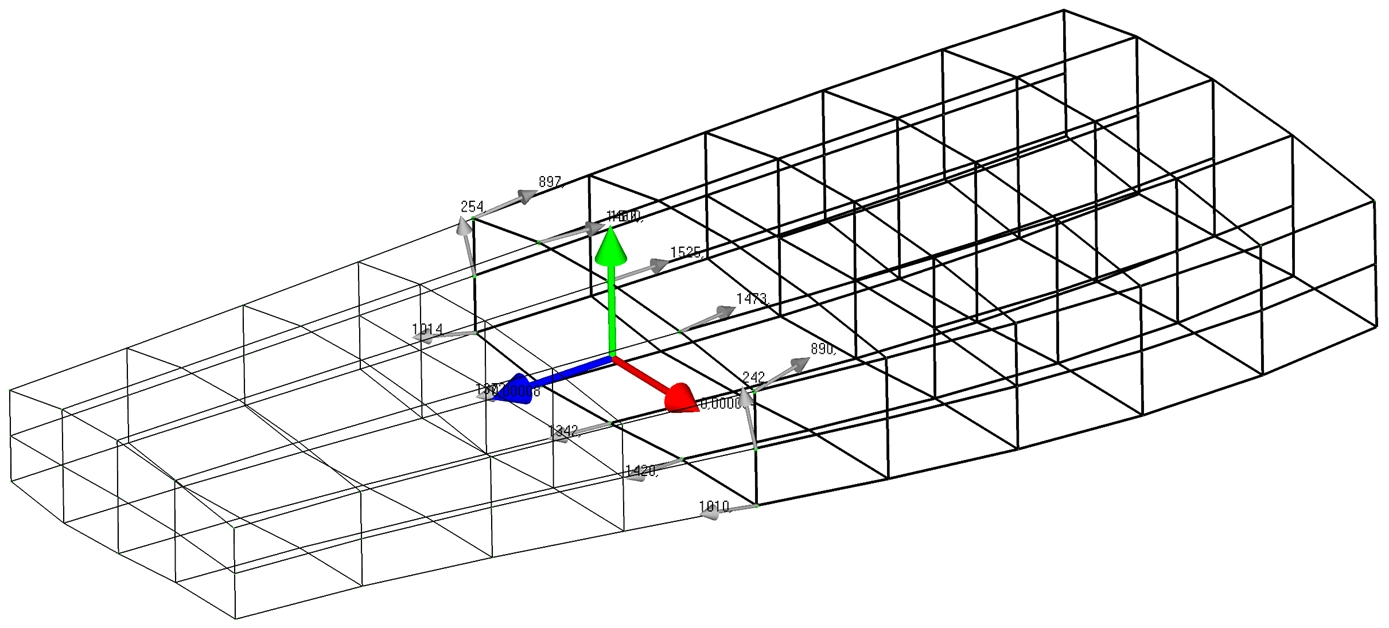
3. Section Cut – подобен режиму Interface Load, суммарные узловые силы и моменты в наборе посчитаны и показаны в графическом окне, тем не менее выбор узлов и элементов автоматизирован FEMAP с помощью определения секущей плоскости, положение которой можно динамически изменять.
В FEMAP каждый набор Freebody может включать в себя шесть различных категорий силовых факторов, в зависимости от их происхождения.
- Applied – приложенные нагрузки
- Reaction – реакции в закреплениях (силы/моменты в SPC)
- MultiPoint Reaction – силы/моменты в RBE и уравнениях связей (MPC)
- Peripheral Elements – силовое воздействие на выбранные элементы со стороны окружающих конечных элементов
- Freebody Elements – силовое воздействие выбранных элементов на окружающие конечные элементы (тоже самое, что и Peripheral Elements, только со знаком минус)
- Nodal Summation – значения суммированных сил/моментов в узлах берется из решателя, а не с помощью вычислений FEMAP
По умолчанию в новый набор Freebody включены вклады от Applied, Reaction, MultiPoint Reaction и Peripheral Elements.
FEMAP Meshing Toolbox
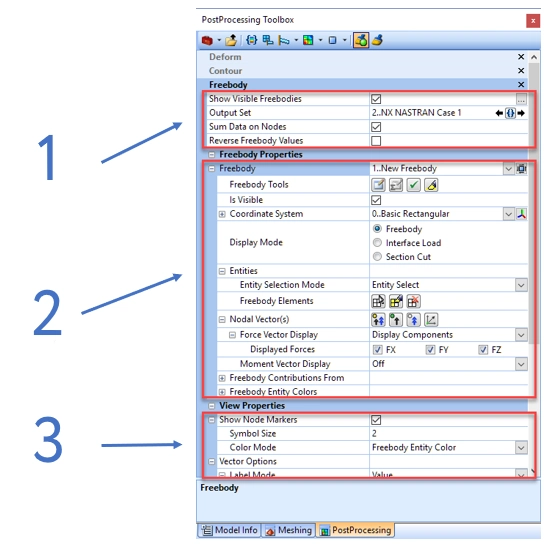
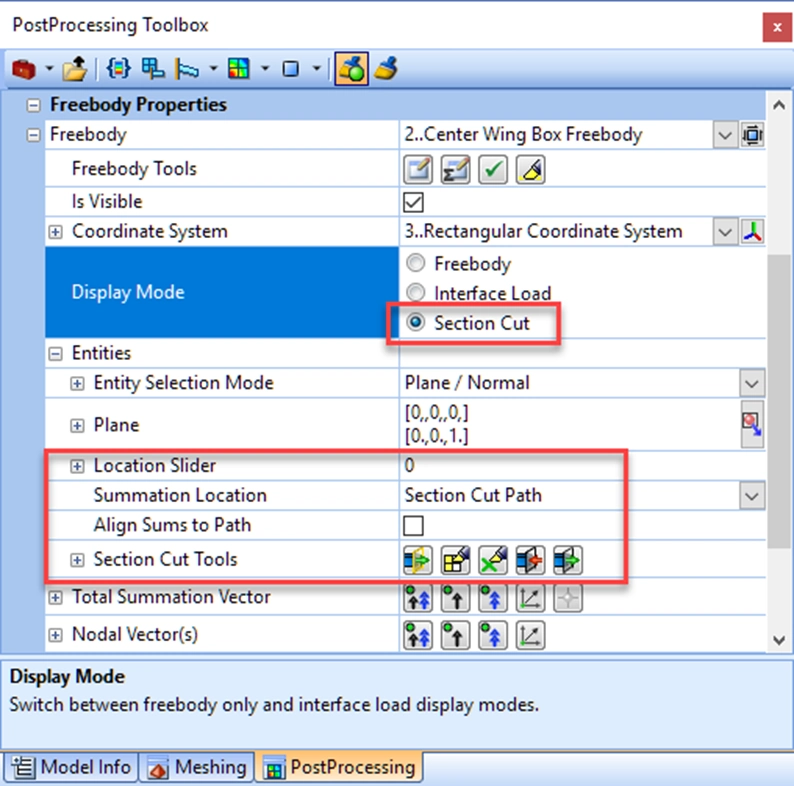
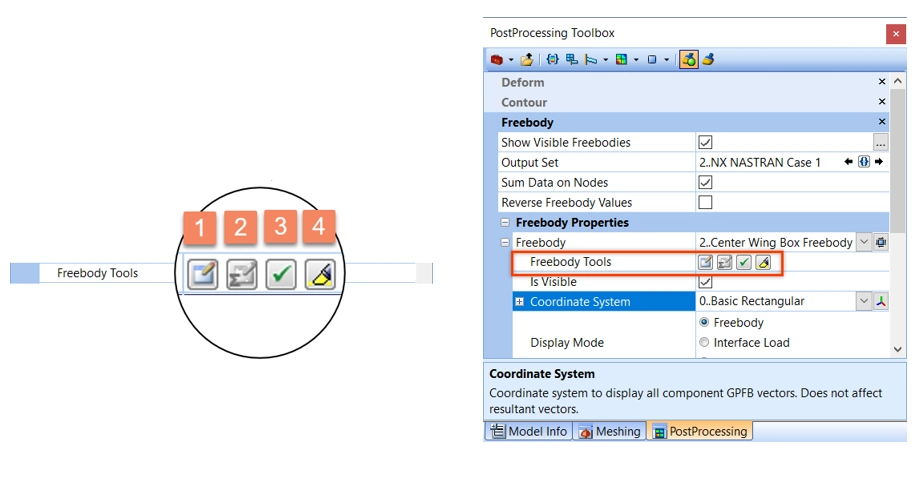
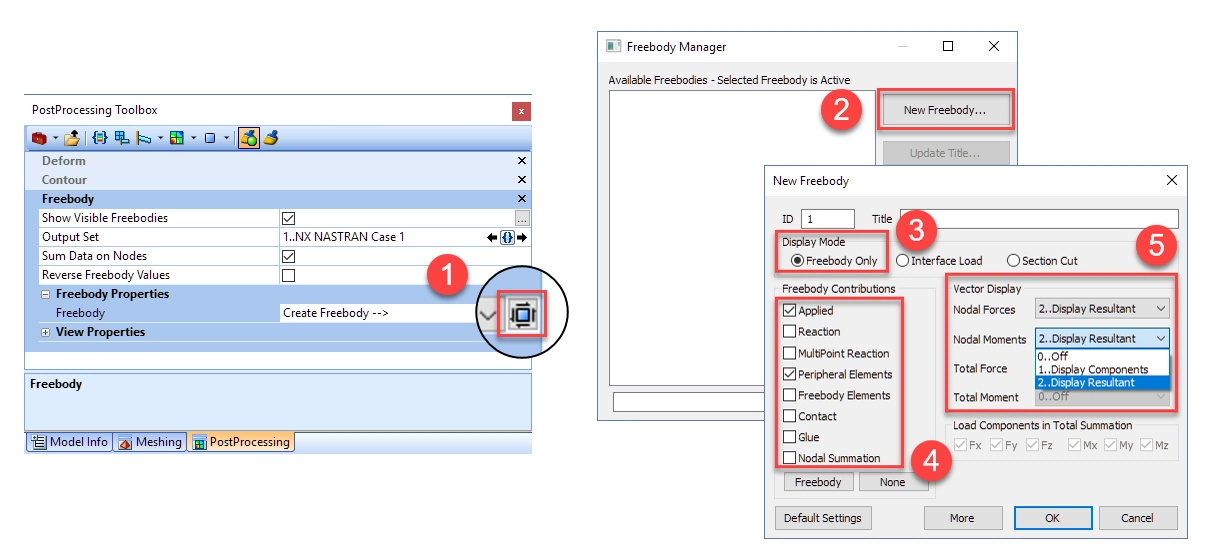
Панель инструментов создания и настроек Freebody находится в диалоговом окне PostProcessing Toolbox на вкладке Freebody. Доступна только при наличии результатов анализа модели.
1 - Глобальные параметры – эти элементы управления влияют на все созданные Freebody в модели: управление глобальным отображением Freebody, выбор выходного набора результатов и включение суммирования узловых данных.
2 - Настройки – эти элементы управления относятся к отдельным созданным Freebody. В этом диалоговом окне можно создать новые Freebody, включить/выключить отображение Freebody, выбрать систему координат, режим отображения, силовые вклады (Freebody Contribution From) и узлы с элементами.
3 - Параметры просмотра – это глобальные настройки, которые влияют на визуализацию Freebody (размеры символов, вектор масштабирования и т. д.). То же, что и в опциях вида View Options (F6).
В панели инструментов PostProcessing Toolbox, на вкладке PostProcessing, в диалоговом окне Freebody, новые Freebody создаются с помощью диалогового окна Freebody Manager.
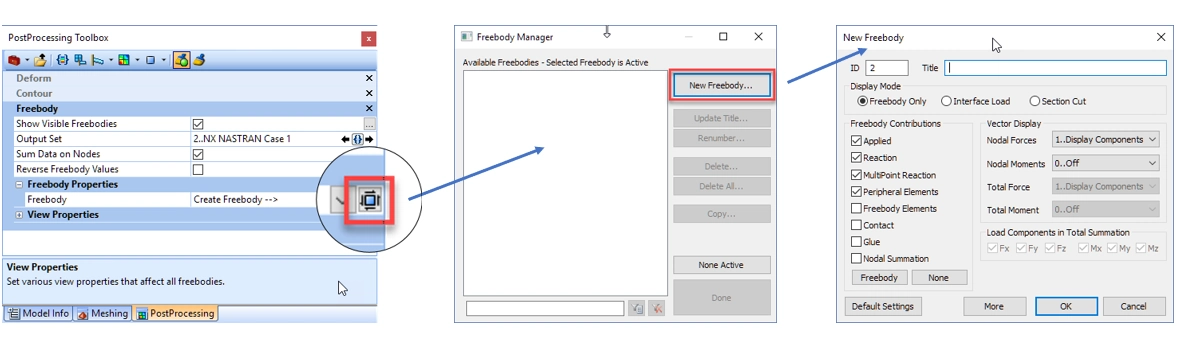
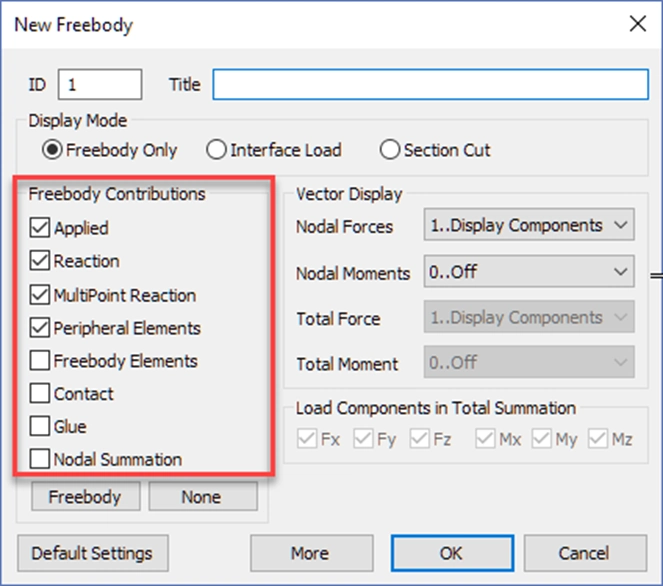
Диалоговое окно New Freebody позволяет настроить основные параметры, такие как режим отображения Freebody (Display Mode), отображение векторов (Vector Display) и выбор силовых вкладов (Freebody Contributions). Любые настройки, примененные в диалоговом окне New Freebody, могут быть изменены в любое время через панель инструментов.
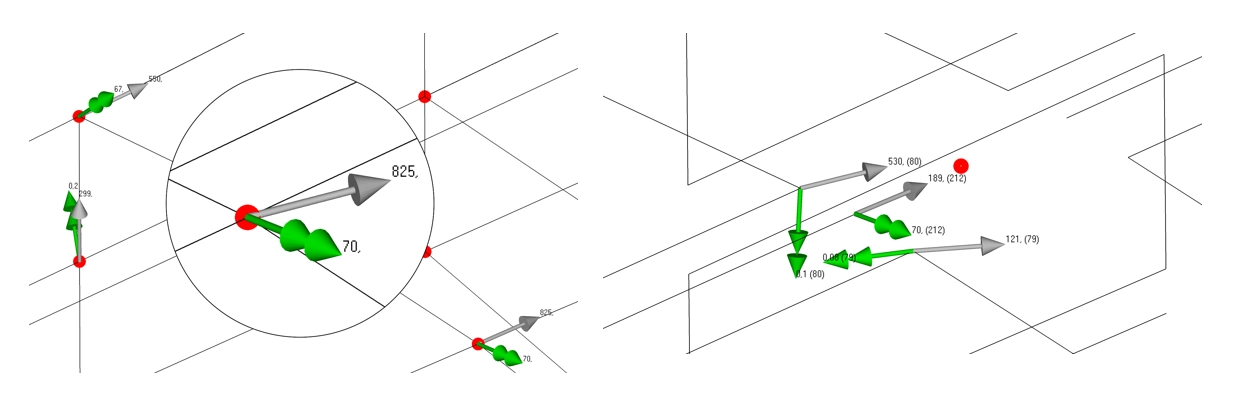
Типы векторов
В зависимости от режима Freebody, вы можете отобразить узловые вектора, либо один вектор суммирования.
Узловые вектора
- Отображают силы и моменты на каждом узле на основе выбранных вкладов Freebody
- Доступны во всех трех режимах отображения Freebody
Вектор суммирования
- Отображает один вектор суммы всех узловых векторов, входящих в Freebody
- Доступен в режимах Interface Load и Section Cut
Оба вектора – силы и моменты, всегда доступны для переключения.
Все вектора могут раскладываться по компонентам, либо отображаться в виде результирующего вектора.
Отдельные компоненты векторов можно включать или выключать.
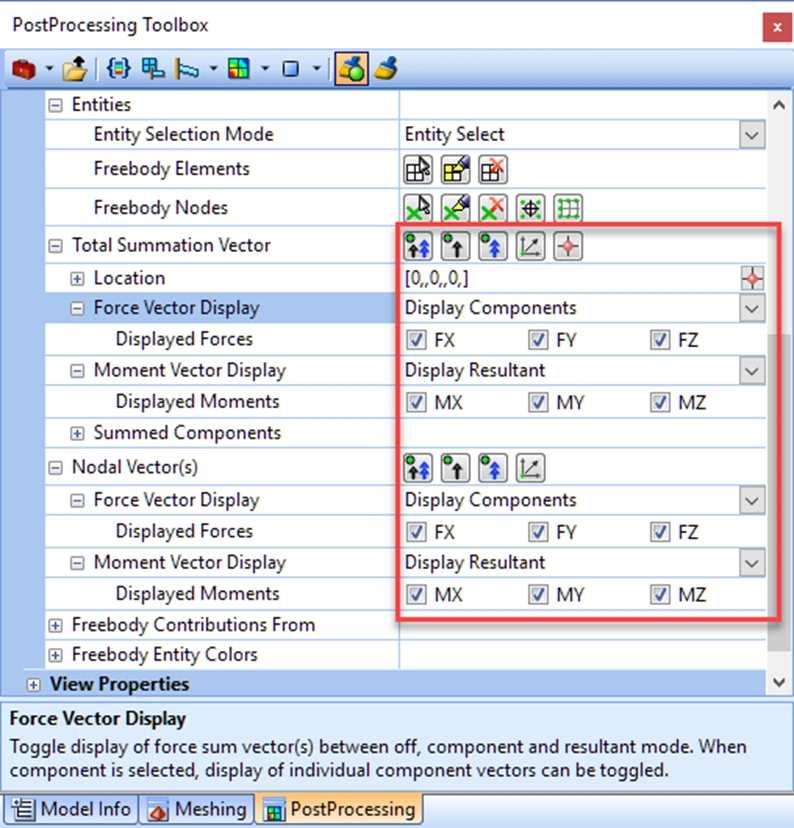
Кнопки быстрого переключения видимости векторов.
- Включить/выключить отображение сил и моментов
- Включить/выключить отображение сил
- Включить/выключить отображение моментов
- Переключиться между отображением векторов по компонентам на результирующие вектора и наоборот
- Выбрать местоположение вектора суммирования (только для режимов Interface Load и Section Cut). Важный пункт при анализе суммарного момента сил.
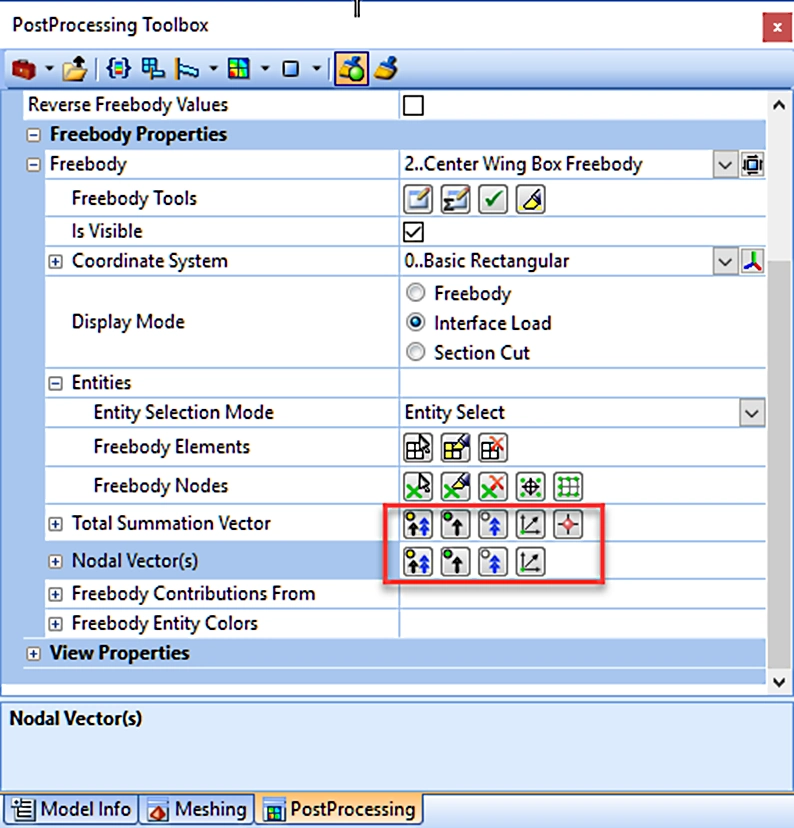
Дополнительные подробные параметры визуализации можно найти, развернув меню Total Summation Vector и Nodal Vector(s).
- Выбор компонентов сил Fx, Fy, Fz и моментов Mx, My, Mz для отображения
Выбор системы координат для Freebody
- Выбранная система координат активируется как для узловых векторов, так и для вектора суммирования (если применимо) для выбранного Freebody
- По умолчанию используется базовая прямоугольная система координат

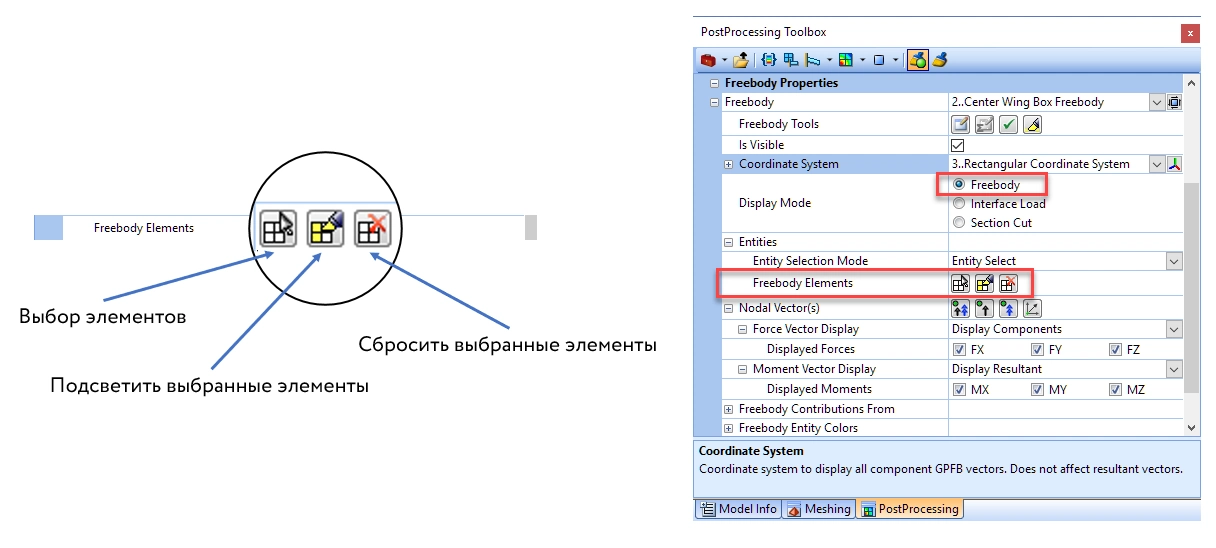
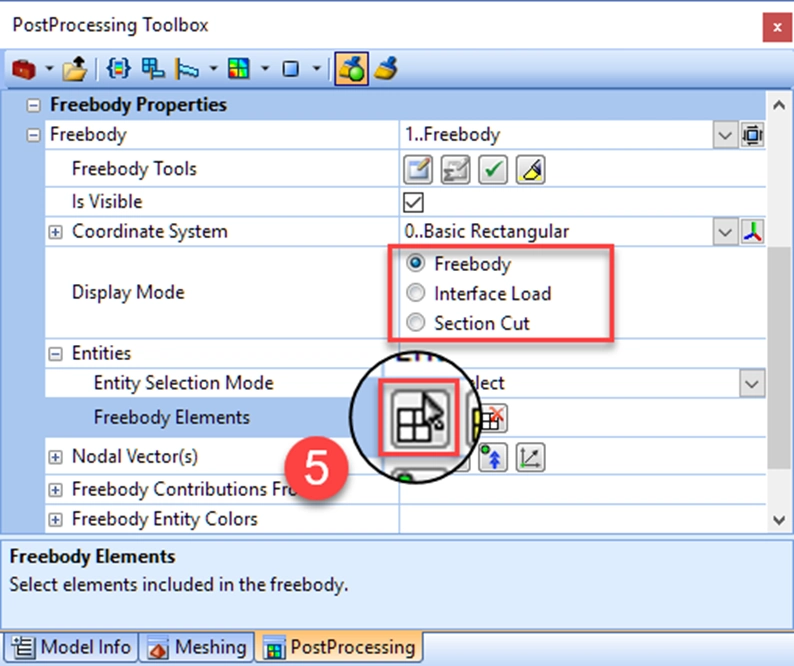
Режим Freebody
- В режиме Freebody пользователь выбирает элементы, и FEMAP автоматически выбирает связанные узлы
- Этот режим предназначен для отображения cбалансированного набора нагрузок на выбранный набор элементов
- Элементы могут быть выбраны вручную (по умолчанию) или c помощью групп
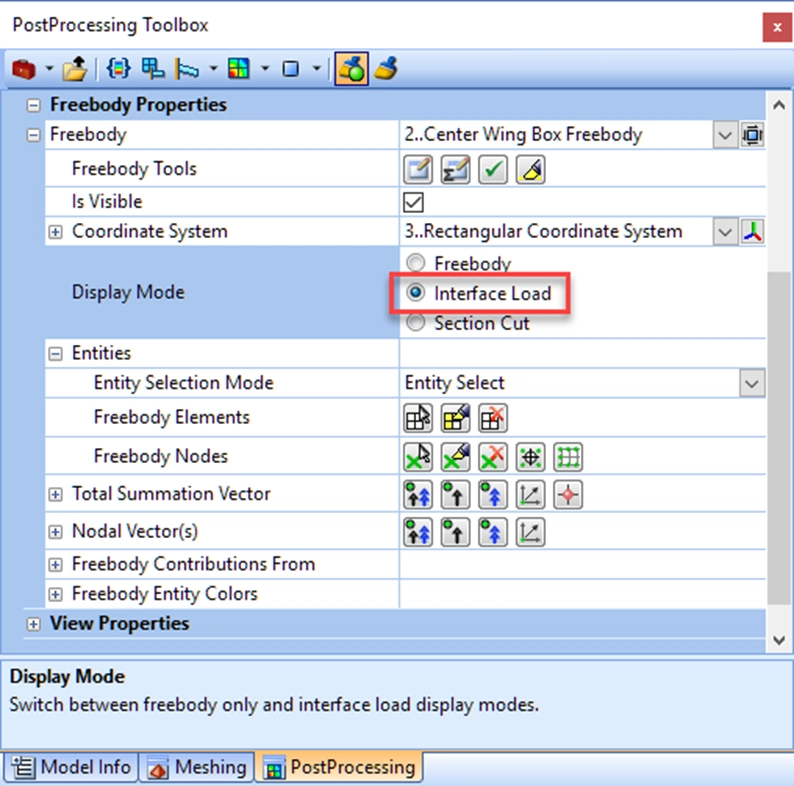
Режим Interface Load
- Отображает узловые векторы для выбранных узлов, а также общий вектор суммирования в выбранном местоположении
- В отличие от режима Freebody, нагрузки в режиме Interface Load могут быть не равновесными
- В дополнение к выбору элементов, узлы должны быть выбраны вручную – FEMAP не выбирает их на основе выбранных элементов
- При выборе объектов из группы в группе должны существовать как узлы, так и представляющие интерес элементы
Режим Interface Load – выбор узлов
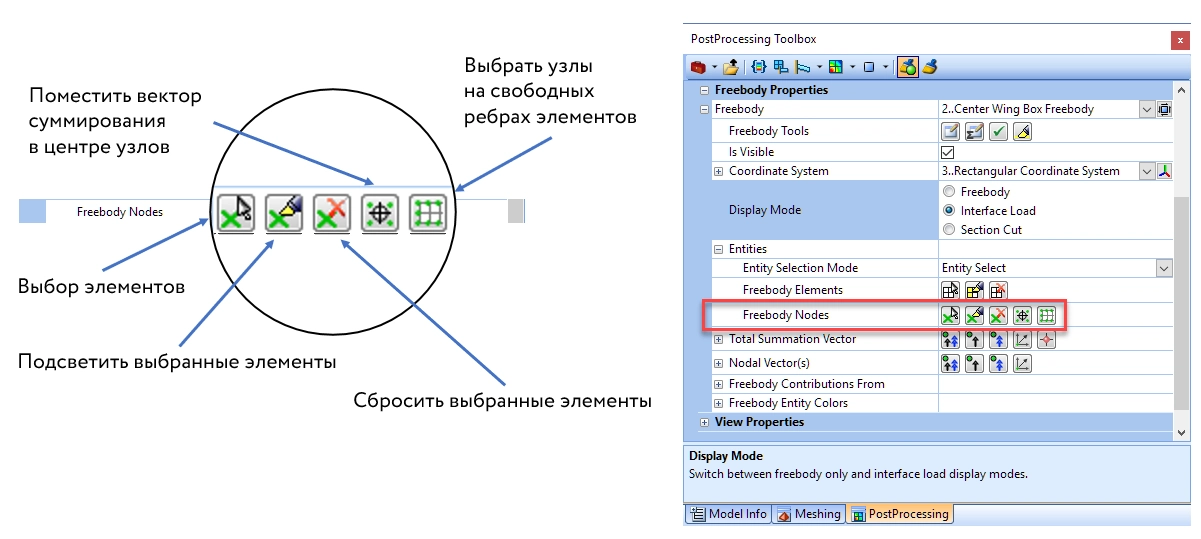
При выборе элементов могут быть выбраны любые элементы, однако будут использоваться только те, которые связаны с выбранными узлами
Режим Interface Load – выбор компонентов для суммирования
- Компоненты сил и моментов, включенные в расчет вектора суммирования, можно включать и выключать
- По умолчанию в расчет вектора суммирования включаются все компоненты сил и моментов
- Внесенные изменения повлияют на расчет вектора суммирования
Включение и выключение некоторых компонентов зависит от того, как модель была идеализирована; такой аналитический подход необходим, чтобы понять, как конечно-элементная модель коррелирует с реальной конструкцией

Режим Section Cut
По своей сути является расширением функциональных возможностей режима Interface Load
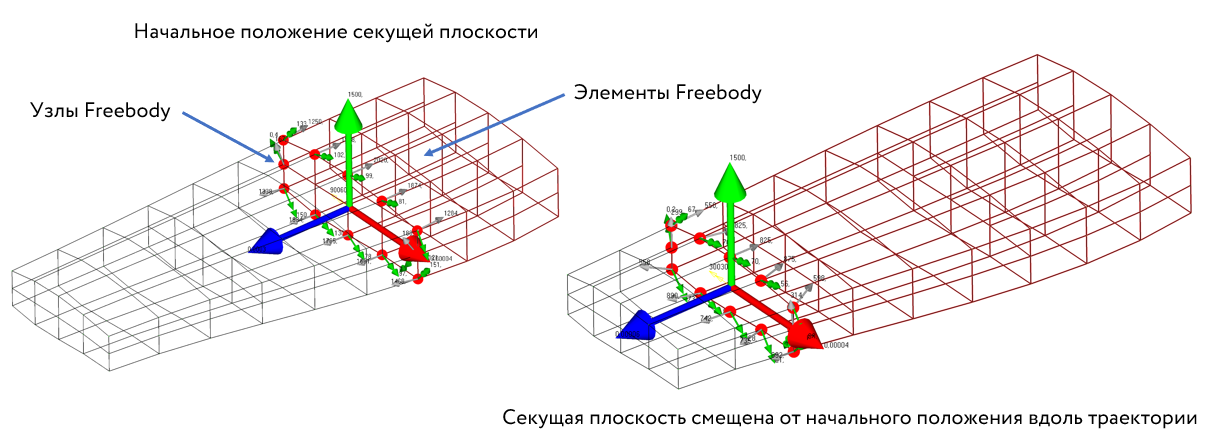
Пользователь определяет секущую плоскость в модели, а соответствующие узлы и элементы Freebody определяются автоматически
Местоположение вектора суммирования определяется:
В месте пересечения секущей плоскости и траектории, по которой она перемещается
В центре узлов
В статическом положении
При активации опции Align Sums to Path, узловые вектора и вектор суммирования будут дополнительно выровнены по касательной к траектории без необходимости создания дополнительных систем координат
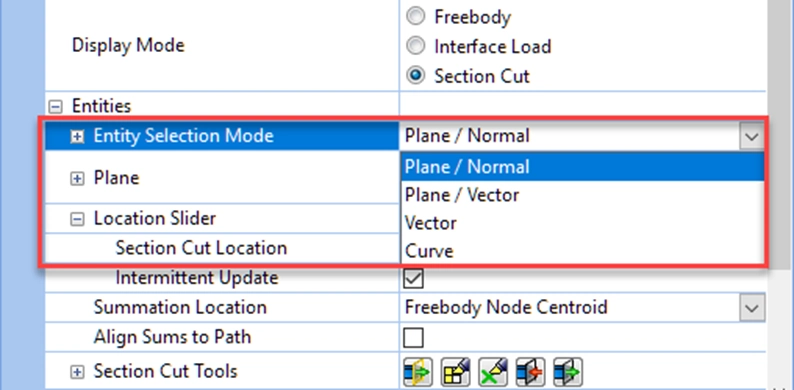
Режим Section Cut – определение секущей плоскости
Plane/Normal: плоскость сечения определяется через базовую точку и вектор нормали. Траектория смещения определяется нормальным вектором; плоскость сечения всегда будет перпендикулярна траектории.
Plane/Vector: аналогично Plane/Normal, однако для траектории смещения определен дополнительный вектор. Секущая плоскость всегда останется компланарной к исходной плоскости и не обязана быть нормальной к траектории.
Vector: секущая плоскость перпендикулярна заданному вектору. Траекторией смещения будет заданный вектор; плоскость сечения всегда перпендикулярна траектории.
Curve: секущая плоскость перпендикулярна касательному вектору в точках вдоль выбранной кривой. Секущая плоскость всегда будет перпендикулярна касательному вектору.
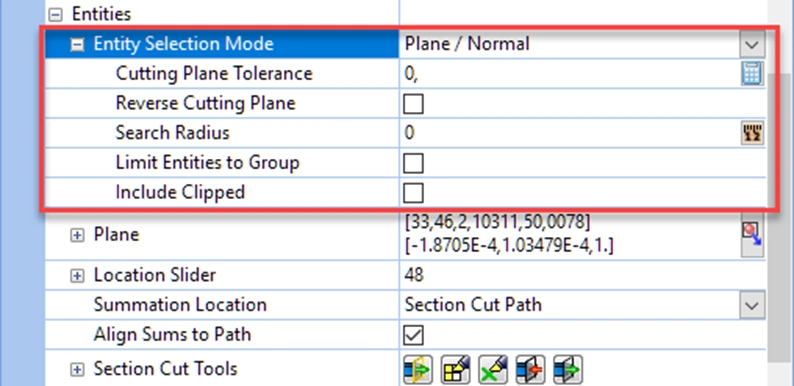
Режим Section Cut – дополнительные настройки
Инструмент ползунок (Location Slider) можно использовать для перемещения секущей плоскости по длине траектории в интерактивном режиме в пределах доступных объектов
Объекты в плоскости сечения могут быть ограничены определенной группой или выбраны из всей модели (Limited Entities to Group), и могут быть ограничены расстоянием поиска от базовой точки плоскости сечения (Search Radius)
Плоскость сечения может быть дополнительно задана допуском по толщине (Cutting Plane Tolerance), который позволит точно выбирать объекты, которые находятся вне плоскости
Режим Section Cut
Дополнительные инструменты Freebody (Freebody Tools)
1 – Вывести баланс сил при активном режиме Freebody с помощью диалогового окна List Force Balance
2 – Вывести баланс сил при активном режиме Interface Load
3 – Инструмент проверки Freebody; предупреждает пользователя, когда результаты Freebody потенциально отсутствуют в модели
4 – Подсветить в графическом окне элементы и узлы из активного набора Freebody
Фрагментация модели с помощью Freebody
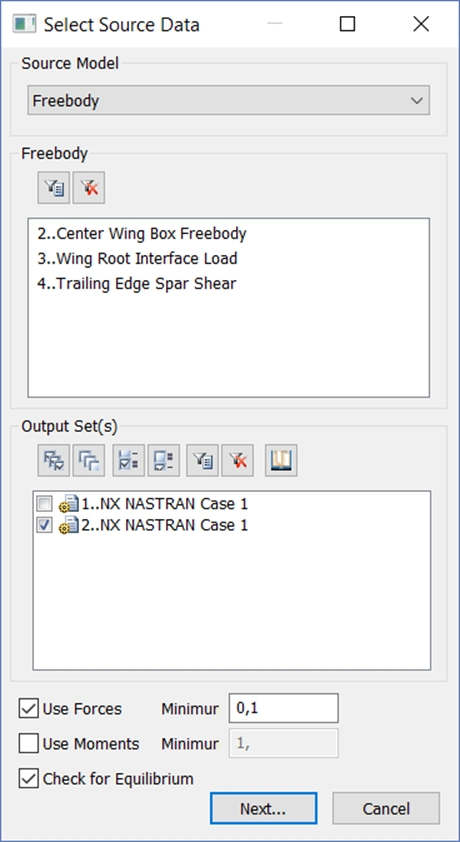
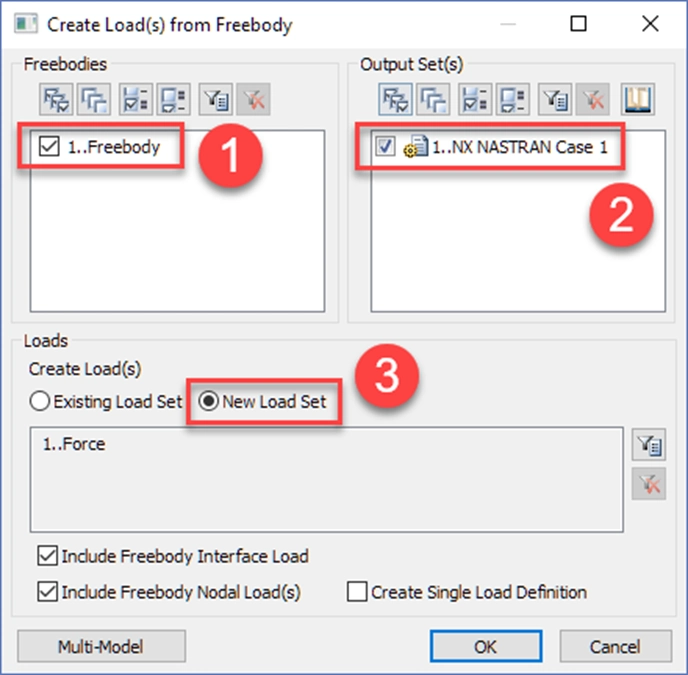
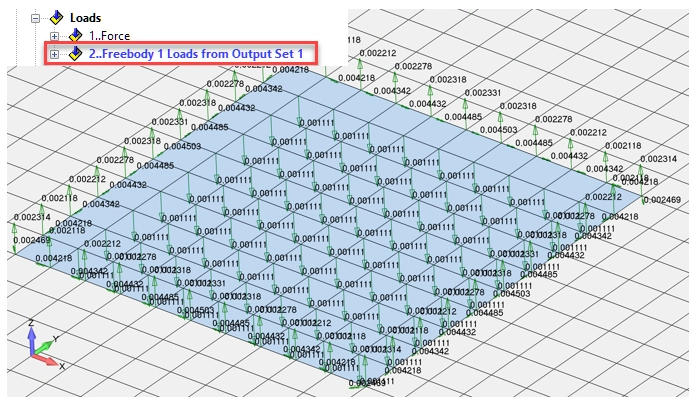
Команда Model > Load > From Freebody автоматизирует создание набора нагрузок из Freebody для новой модели.
Интерфейс позволяет осуществить переход от глобальной модели к локальной, для детального анализа подконструкции.
Используется для сопоставления нагрузок Freebody из модели с грубой сеткой на модель с уточненной сеткой и автоматического создания соединений с элементами RBE3 для передачи нагрузок.
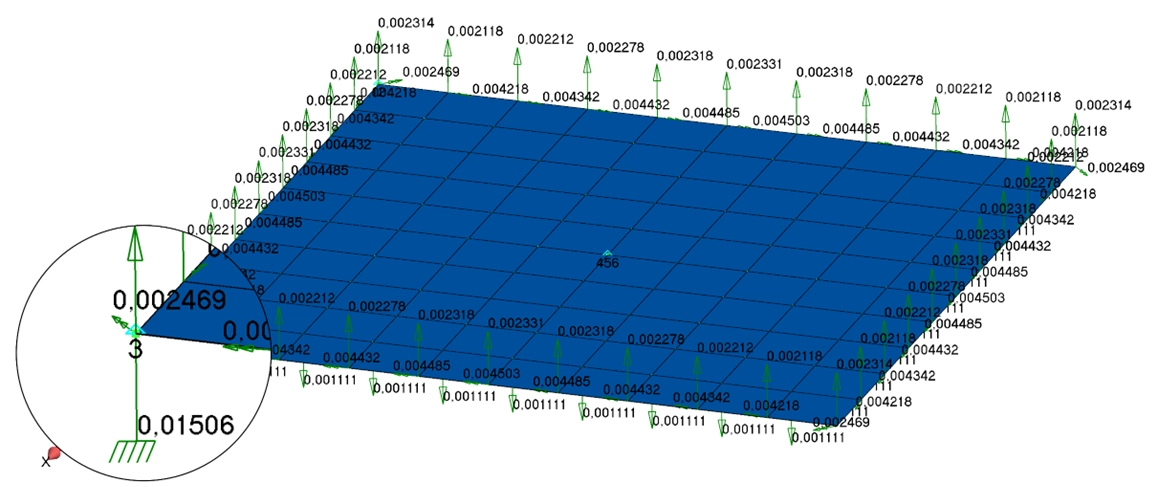
Начните с создания набора сил Freebody, которые уравновешивают локальную модель
FEMAP может автоматически находить подходящие целевые узлы в уточненной сетке локальной модели и соединить их элементами RBE3 для передачи нагрузки с грубой сетки
Наложите ограничения свободы на подходящие узлы, либо воспользуйтесь опцией Inertia Relief, чтобы FEMAP автоматически уравновесил локальную модель силами инерции (опция Inertia Relief доступна только для 101 решателя)
Локальная модель должна находится в трехмерном пространстве в тех же координатах, в каких она находилась в глобальной модели
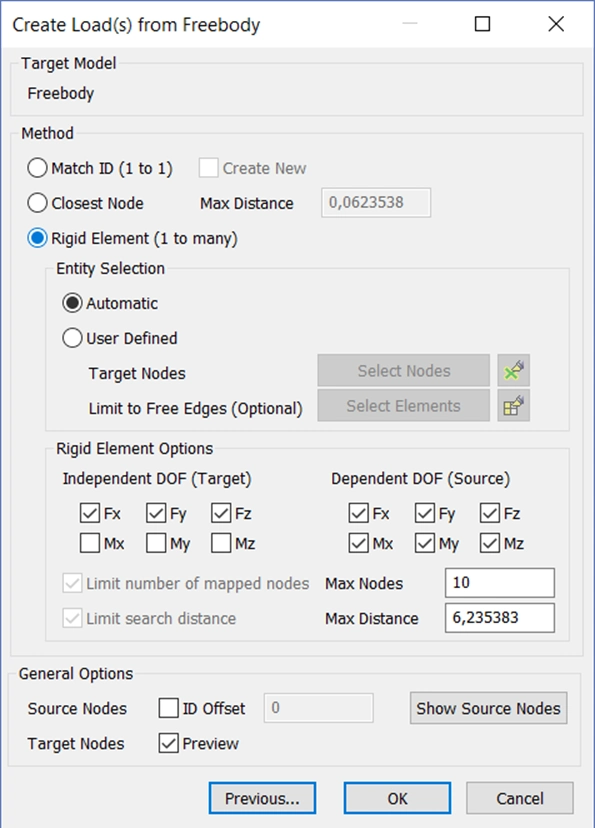
Параметры переноса сил и моментов в локальную модель
Нагрузки Freebody могут быть перенесены на локальную модель с помощью трех методов:
1. Match ID (1 to 1)
Нагрузки переносятся на локальную модель в узлы с теми же идентификаторами, что и в глобальной модели.
2. Closest Node
Нагрузки переносятся на ближайшие по координатам узлы локальной модели. Параметром Max Distance можно задать необходимый допуск.
3. Rigid Element (1 to many)
Нагрузки переносятся с помощью интерполирующих элементов RBE3. Пользователь может определить узлы, на которые необходимо передать нагрузки Freebody, либо позволить FEMAP сделать это в автоматическом режиме.
Дополнительно
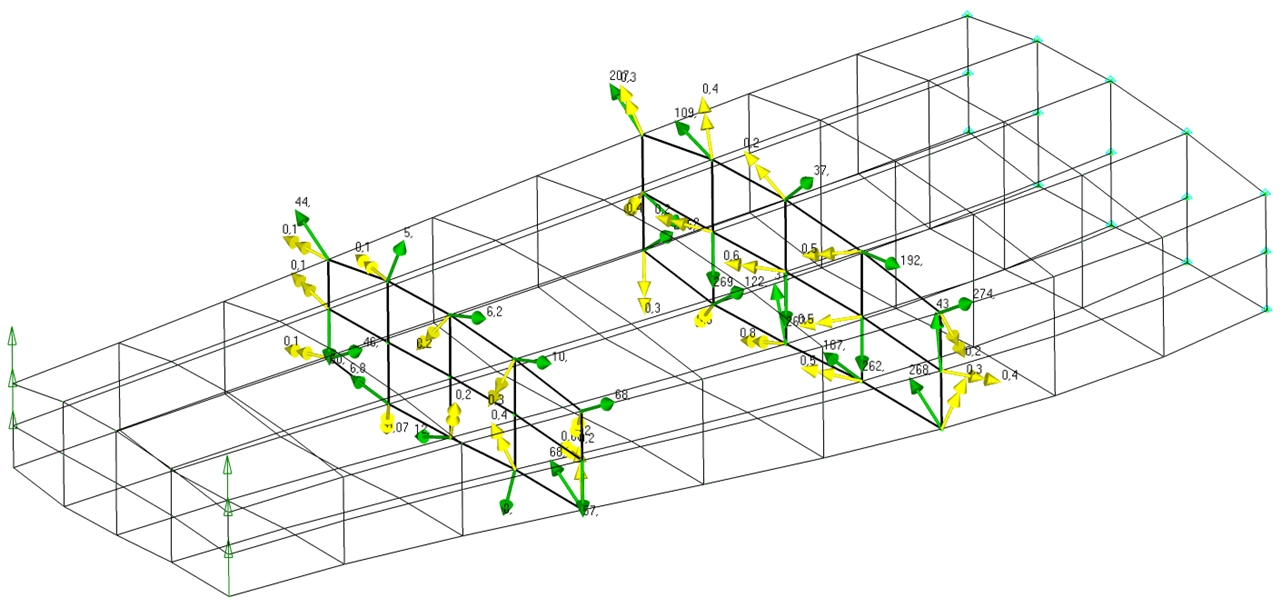
По умолчанию векторы Freebody на каждом узле отображаются в виде суммирования выбранных компонентов по вкладам от каждого элемента, которому принадлежит узел.
Глобальный параметр Sum Data on Nodes позволяет отображать узловые величины в виде отдельных вкладов от каждого элемента. Он влияет на все отображаемые векторы Freebody
Этот параметр лучше всего использовать с включенной опцией отображения элементов Shrink
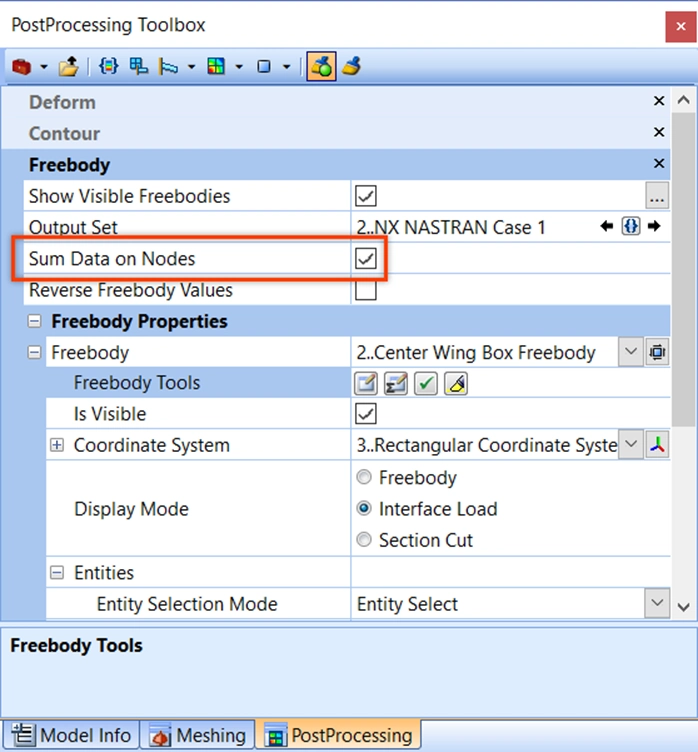
ПараметрSum Data on Nodes

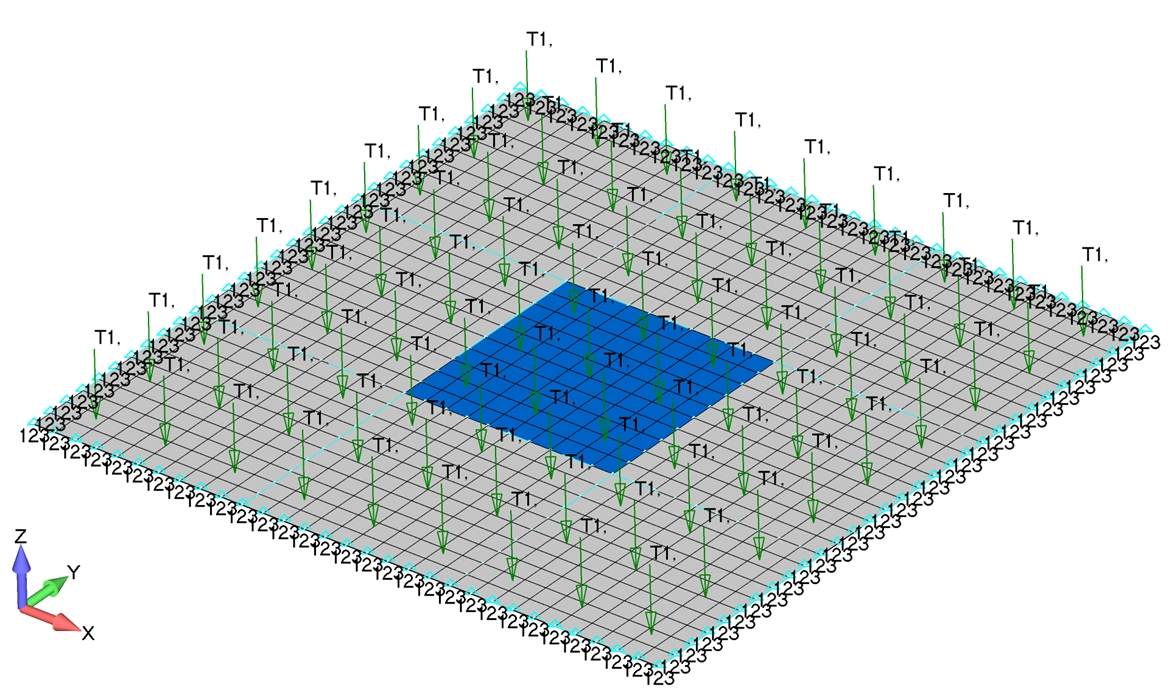
Пример фрагментации модели
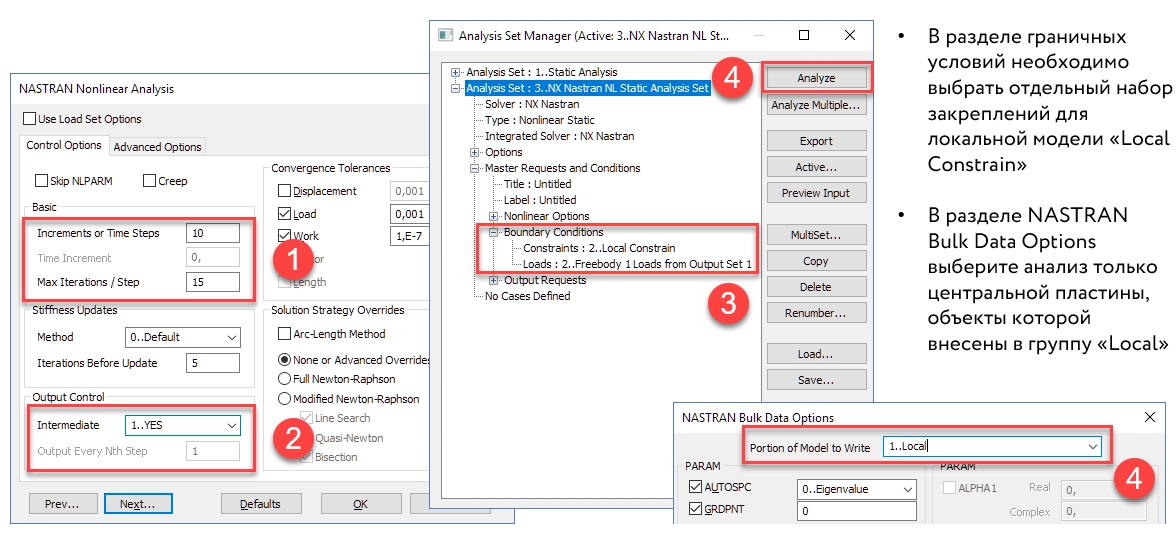
Выполним нелинейный анализ центральной части пластины
- Пластина аппроксимирована пластинчатыми конечными элементами типа CQUAD4 толщиной 0.1 см
- Размеры пластины 3х3 см
- Размеры локальной пластины 1х1 см
- Материал обоих пластин – сталь
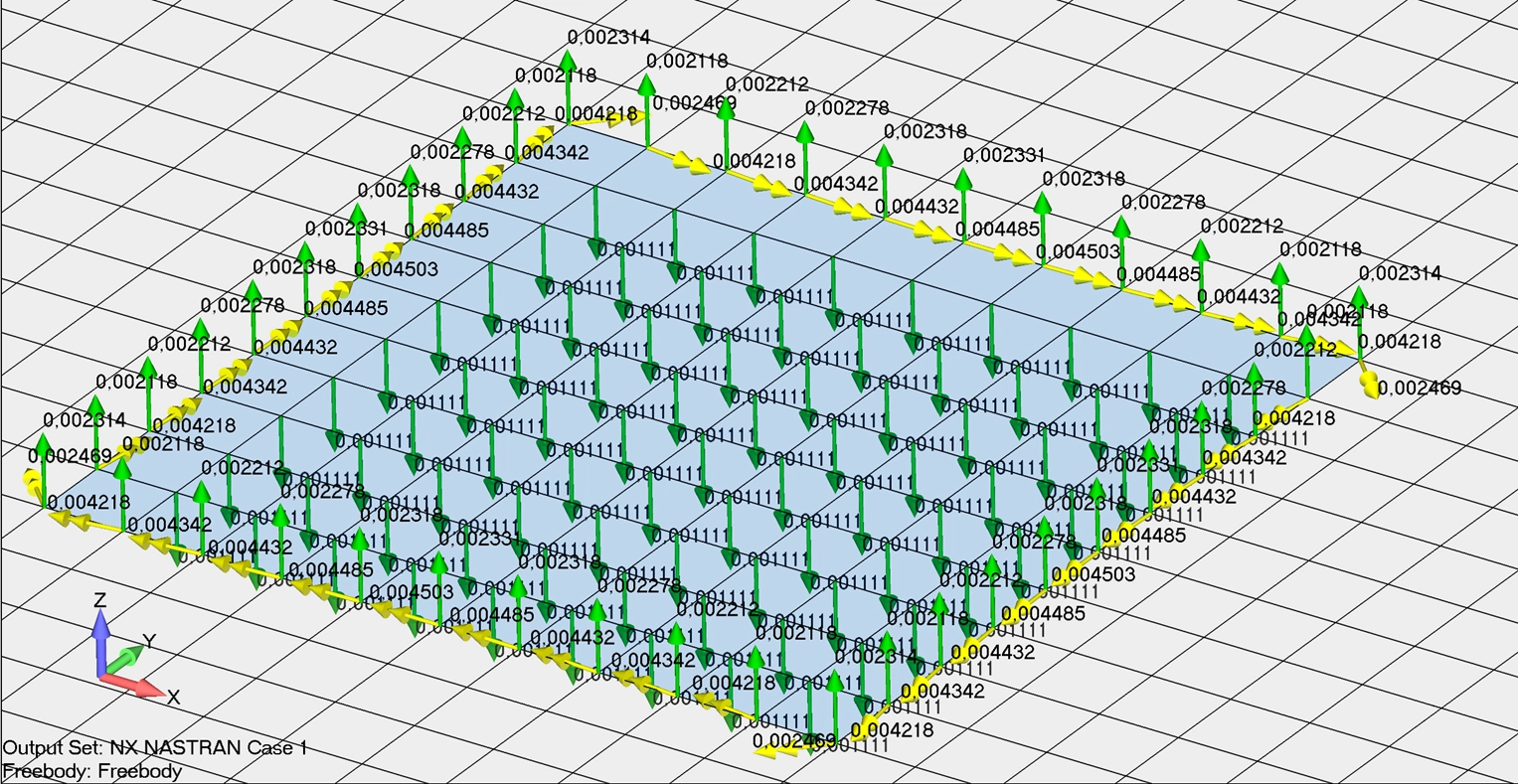
- Сила действует перпендикулярно плоскости пластины и равномерно распределена по всей поверхности. Суммарное значение Fz=-1 кН
- На узлы свободных ребер пластины наложены ограничения свободы по T1, T2 и T3
- Элементы и узлы локальной модели находятся в отдельной группе «Local».
Создание Freebody
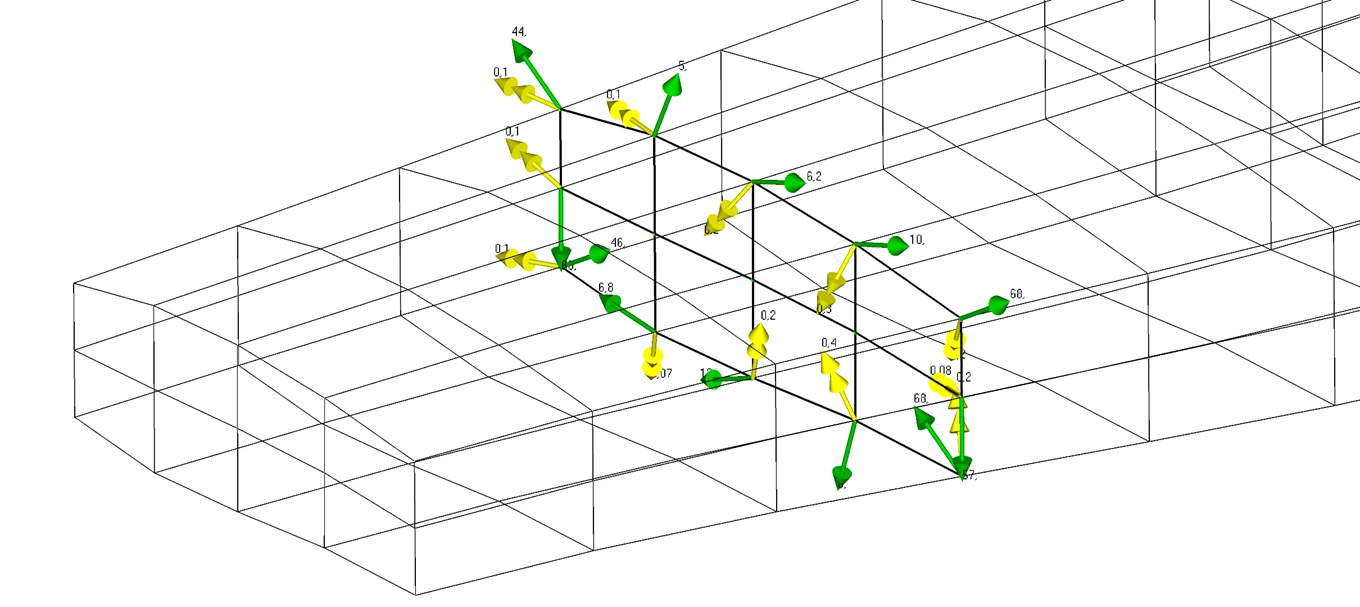
На центральную пластину действуют приложенные нагрузки и силы с моментами, приходящие со стороны окружающих элементов. Поэтому в разделе Freebody Contributions выбираем Applied и Peripheral Elements.
Создание Freebody – выбор элементов
Создание нового набора нагрузок из Freebody (Model > Load >From Freebody)
Пример фрагментации модели
Фиксация модели от перемещений как твердого тела
Важно выбрать правильные узлы для задания предопределенных перемещений, чтобы получить верный результат. В противном случае, картина на локальной модели может полностью не соответствовать результатам расчета глобальной модели
Закрепления должны ограничить модель от перемещений как твердого тела – иными словами – избежать ошибки механизма в модели
Закрепления локальной модели необходимо создать в новом наборе закреплений
Выбор узлов с предопределёнными перемещениями всегда индивидуален и зачастую зависит от целей локального анализа
Вместо использования ненулевых закреплений можно воспользоваться обычным ограничением степеней свободы таких узлов, чьи перемещения и повороты в расчете глобальной модели являются нулевыми
Быстро найти такие узлы можно с помощью таблицы данных Data Table
Необходимо внести все узлы локальной модели в таблицу данных и, с помощью сортировки, найти узлы с нулевыми перемещениями и поворотами.
На практике, всегда найдется узел с каким-либо ненулевым компонентом перемещения. На этот узел необходимо наложить нагрузку в виде соответствующего перемещения с помощью команды Model > Load > From Output (ненулевое закрепление)
Поиск узлов с нулевыми перемещениями и поворотами по результатам расчета глобальной модели с помощью таблицы данных Data Table
Для быстрого поиска можно использовать фильтр таблицы данных, например, для поиска узлов с нулевыми поворотами
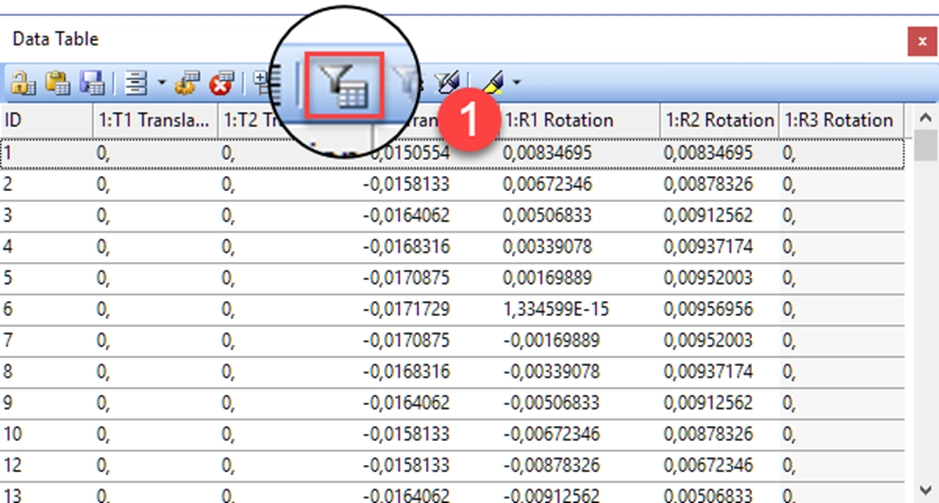
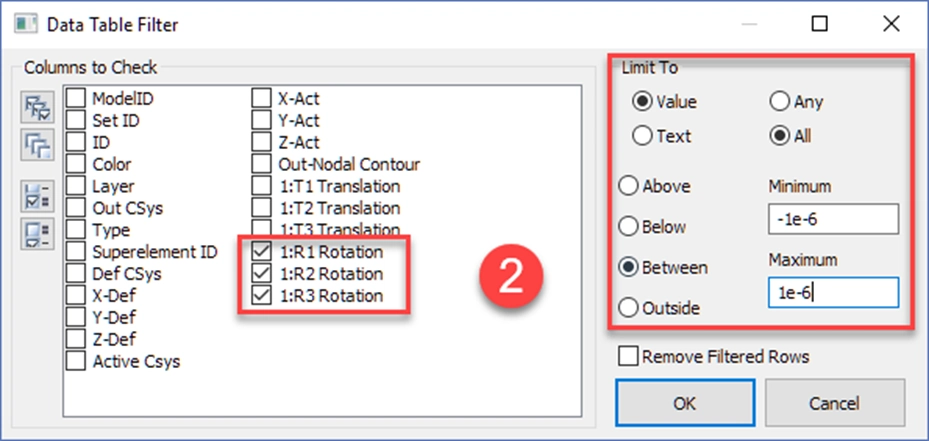
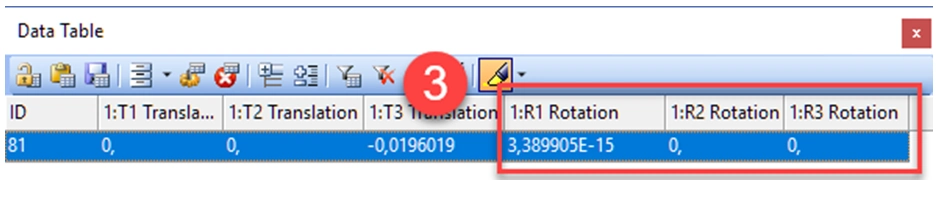
Узел с идентификатором ID=81 можно закрепить по всем вращательным степеням свободы R1, R2, R3. Также, можно закрепить любой узел локальной модели по T1 и T2
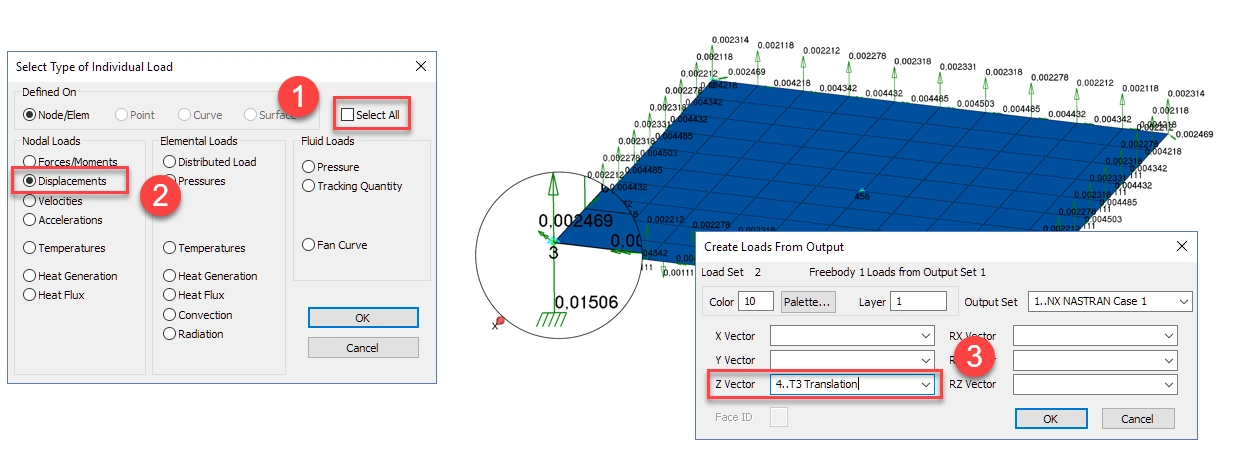
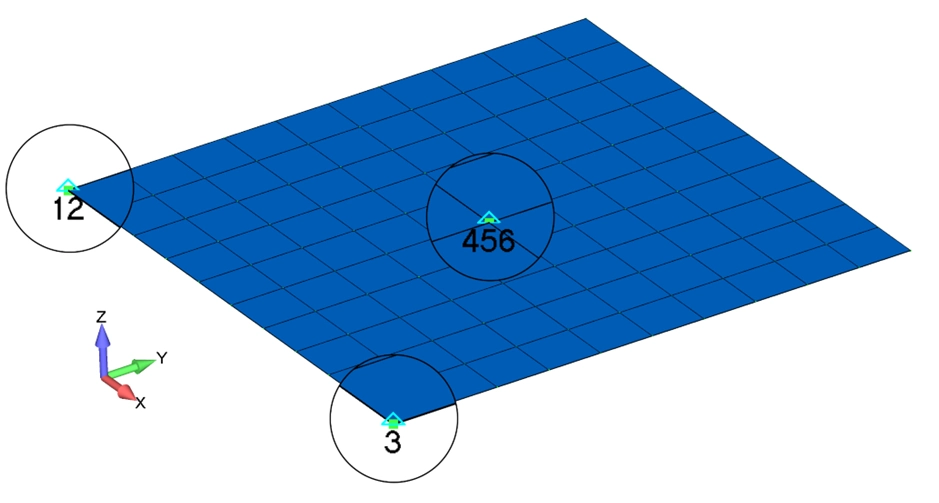
Задание ненулевого закрепления
В данной модели можно выбрать узел на границе локальной модели для задания ненулевого закрепления по компоненте T3 с помощью команды Model > Load > From Output
Лучше всего, любые ненулевые закрепления размещать в местах, отдаленных от анализируемой части подконструкции
Таким образом, локальная модель была полностью ограничена от перемещений как твердое тело
Это позволяет выполнить нелинейный анализ
При решении локальной задачи в линейной постановке достаточно перенести Freebody в набор нагрузок и воспользоваться опцией Inertia Relief, чтобы уравновесить конструкцию силами инерции. При таком подходе к фрагментации можно анализировать только напряжения потому, что перемещения будут не соответствовать перемещениям глобальной модели
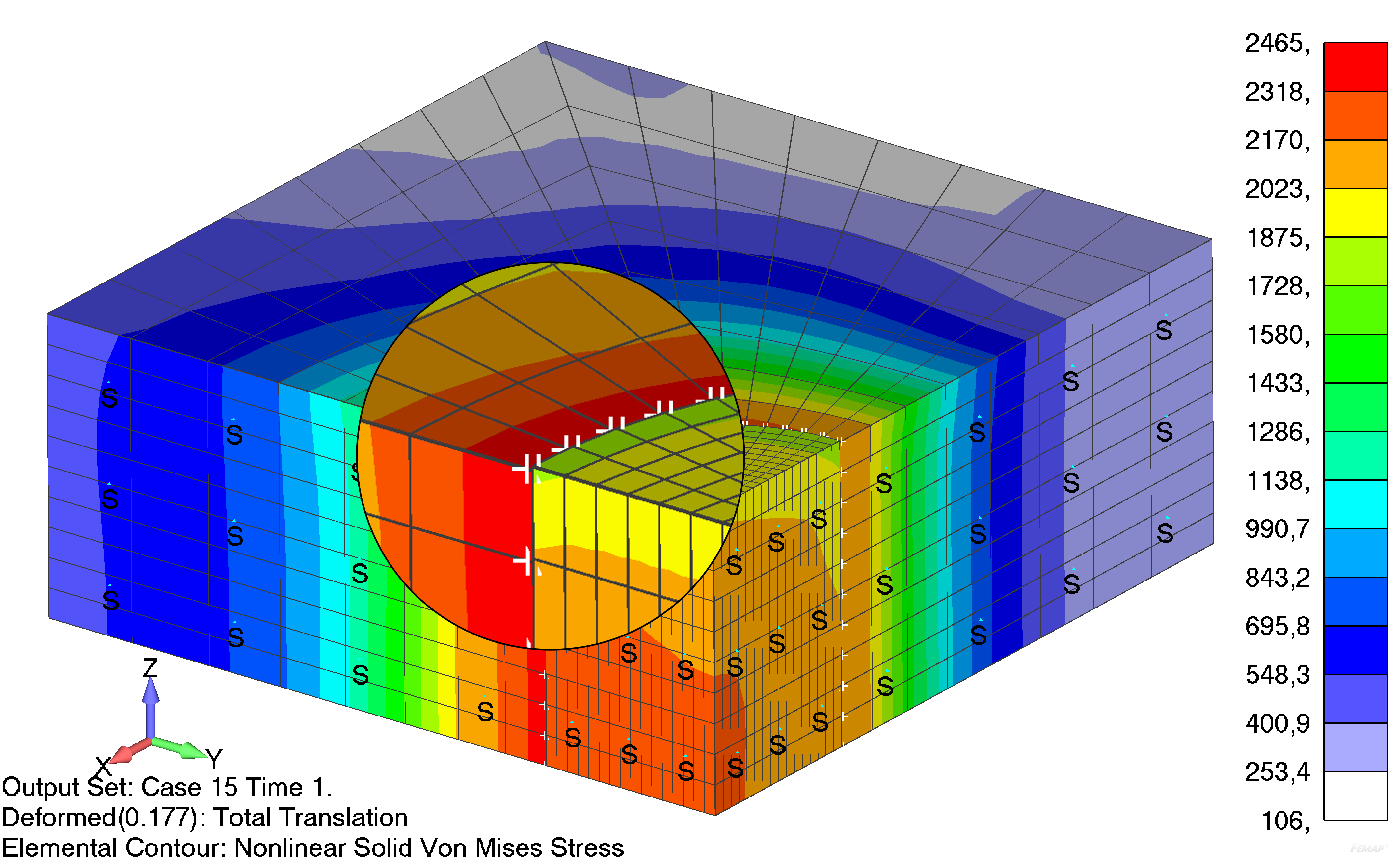
Нелинейный анализ подконструкции
В разделе граничных условий необходимо выбрать отдельный набор закреплений для локальной модели «Local Constrain»
В разделе NASTRAN Bulk Data Options выберите анализ только центральной пластины, объекты которой внесены в группу «Local»
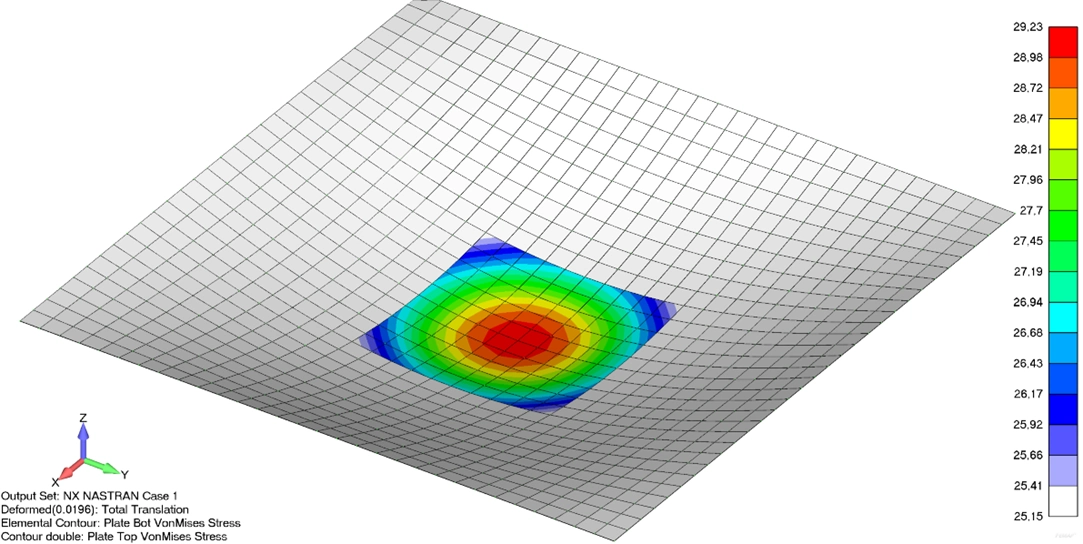
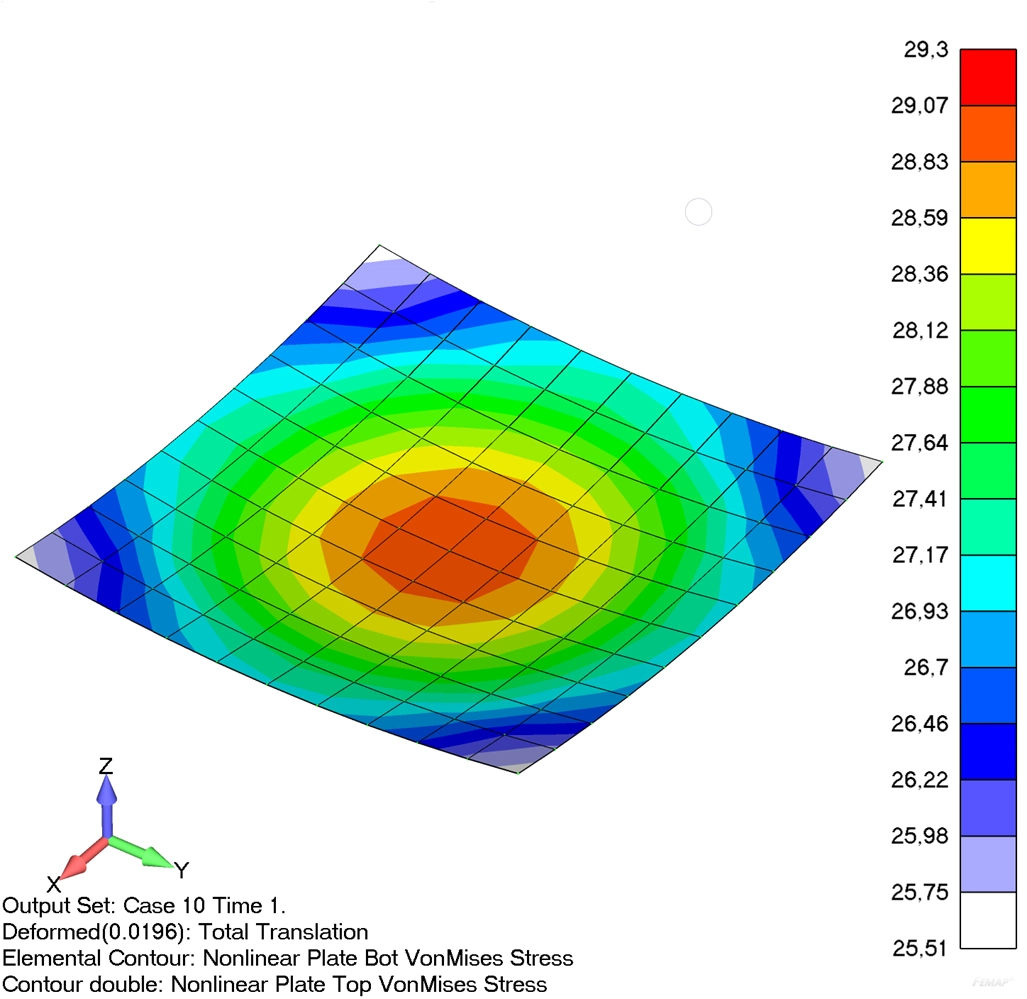
Сравнение результатов линейного анализа глобальной модели с результатами нелинейного анализа локальной модели в составе глобальной
Перед изменениями локальной модели всегда необходимо выполнять проверку согласованности результатов

.svg)





























.jpg)
.jpg)


