

Элемент односторонней связи GAP
На слайде представлены российские и зарубежные компании из различных
отраслей промышленности , которые успешно используют Femap.
Нелинейный элемент, имеющий различные жесткости на растяжение, сжатие и сдвиг
• Используется для моделирования контактного взаимодействия между двумя узлами, которые могут иметь либо различные, либо одинаковые координаты
• Имеет следующие свойства:
- Начальное значение раскрытия элемента GAP
- Жесткость в различных направлениях
- Коэффициенты трения
- Предварительное нагружение
• Система координат элемента не поворачивается в процессе деформирования. В линейном анализе элемент ведет себя подобно MPC связям
• Система координат задается двумя способами
- Первый способ аналогичен способу задания системы координат элемента Bar, и может быть использован только в том случае, если расстояние между узлами превышает 10e-4
- Второй способ состоит в задании одной из локальных систем координат. В этом случае оси X, Y, Z элемента будут совпадать с соответствующими направлениями смещений в этой системе координат, то есть ось X будет направлена по направлению TX, ось Y – по направлению TY, ось Z – по направлению TZ
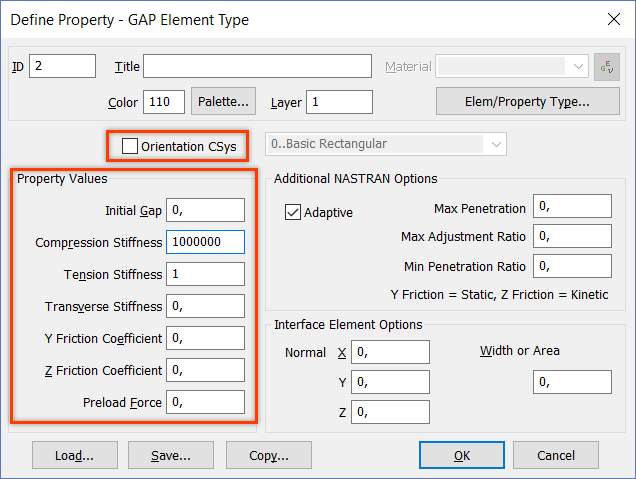
Создание элемента GAP
- При активизации опции Orientation CSys включается второй способ задания системы координат элемента. Она определяется направлениями смещений в выбранной системе координат. Вектор ориентации в этом случае игнорируется
- В поле Initial Gap задается начальное раскрытие элемента
- В поле Compression Stiffness (жесткость на сжатие) задается жесткость контактного взаимодействия . Эту жесткость рекомендуется задавать больше, чем местная жесткость модели на несколько порядков. Сжимающее усилие в контакте является положительной величиной.
- В поле Tension Stiffness (жесткость на растяжение) задается жесткость при отсутствии контакта между узлами
- В поле Transverse Stiffness задается жесткость элемента в поперечном направлении
- В полях Y Friction Coefficient и Z Friction Coefficient задаются коэффициенты трения в направлении осей Y и Z.
- В полe Preload Force можно задать предварительную силу в контакте, но делать этого не рекомендуется из-за возникающих проблем со сходимостью.
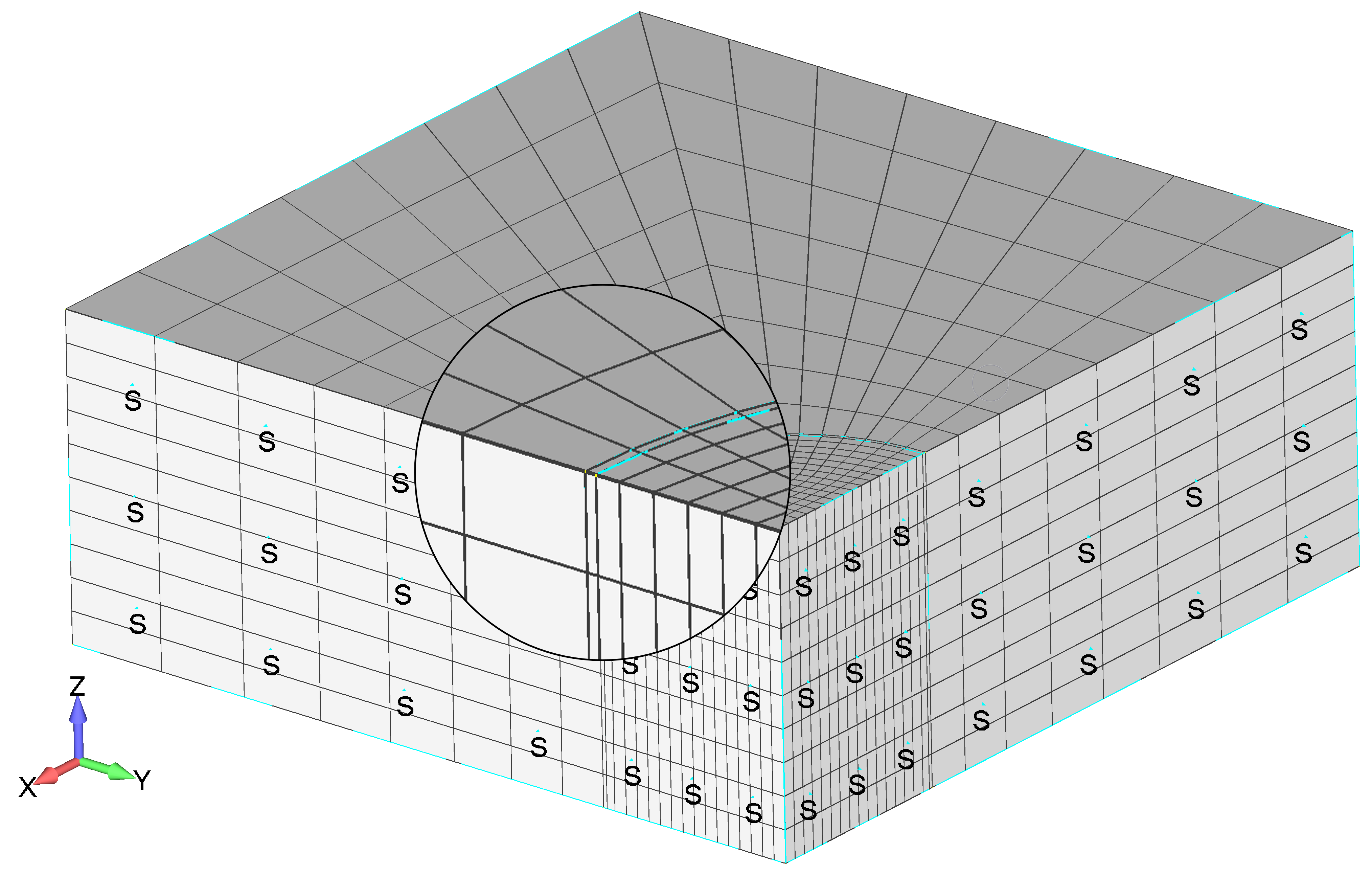
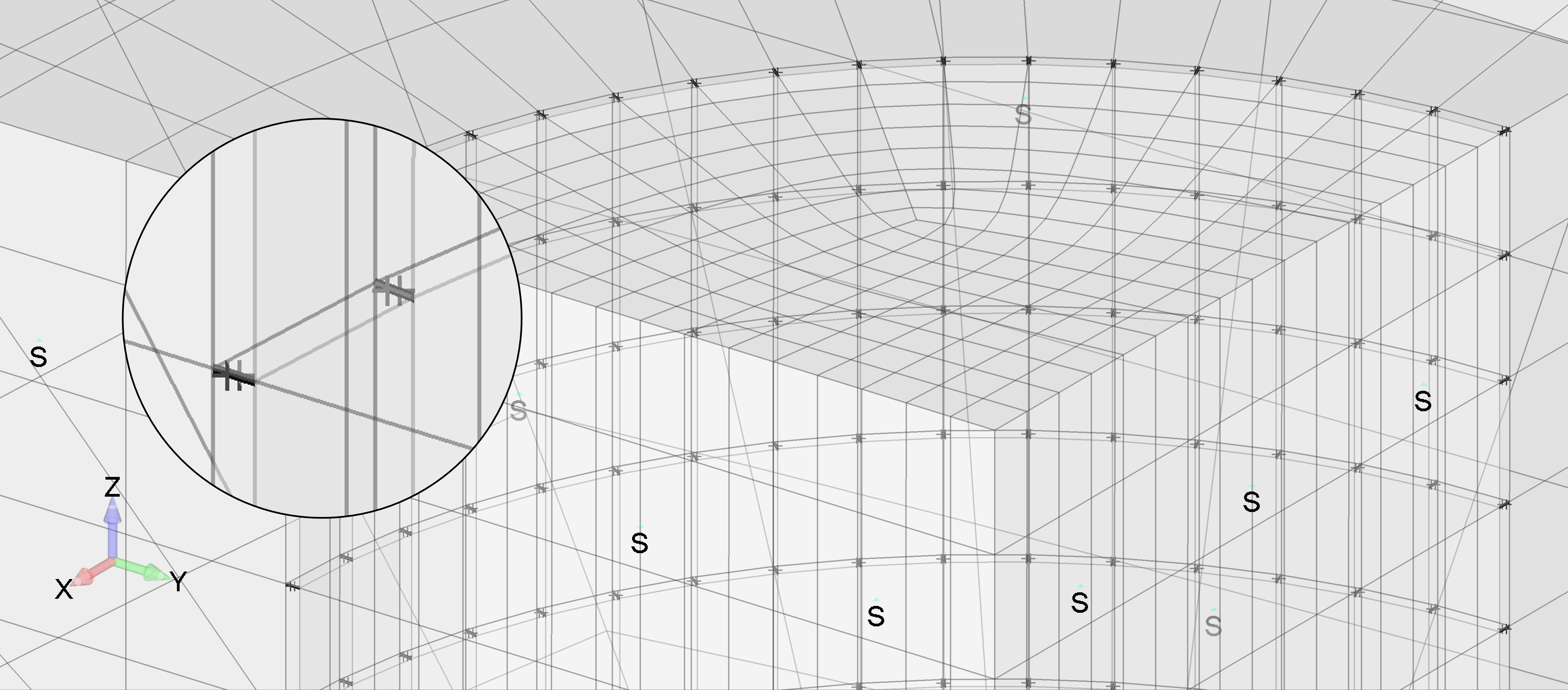
Посадка вала с натягом с использованием элементов GAP
Постановка задачи
- Геометрия модели создана с учетом взаимного проникновения вала в тело детали
- Элементы GAP можно настроить таким образом, чтобы они выталкивали узлы на поверхности вала на заданное расстояние
- Такой метод позволяет быстро и точно задать допуск посадки, без использования температурного расширения элементов
- На модель заданы ограничения симметрии по трем плоскостям
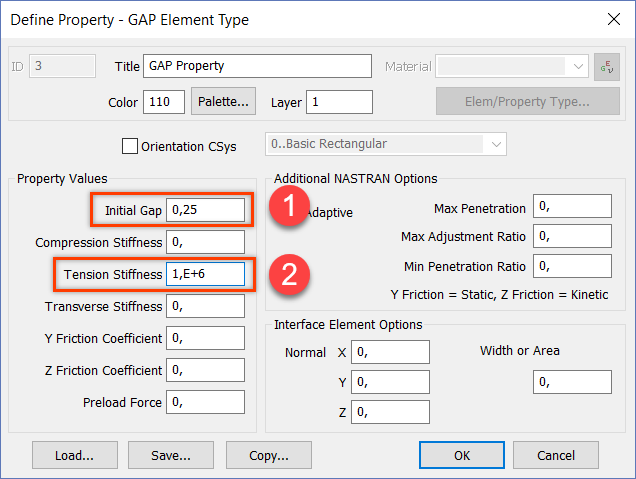
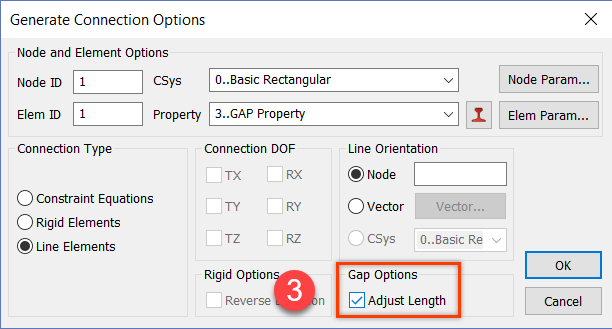
Задача посадки вала с натягом с использованием элементов GAP
В разделе Property Values необходимо установить следующие параметры:
1. Initial Gap = 0.25 – величина посадки вала
2. Tension Stiffness = 1e6 – жесткость элементов GAP на растяжение
3. Во время создания элементов GAP активируйте опцию Adjust Length в разделе Gap Options
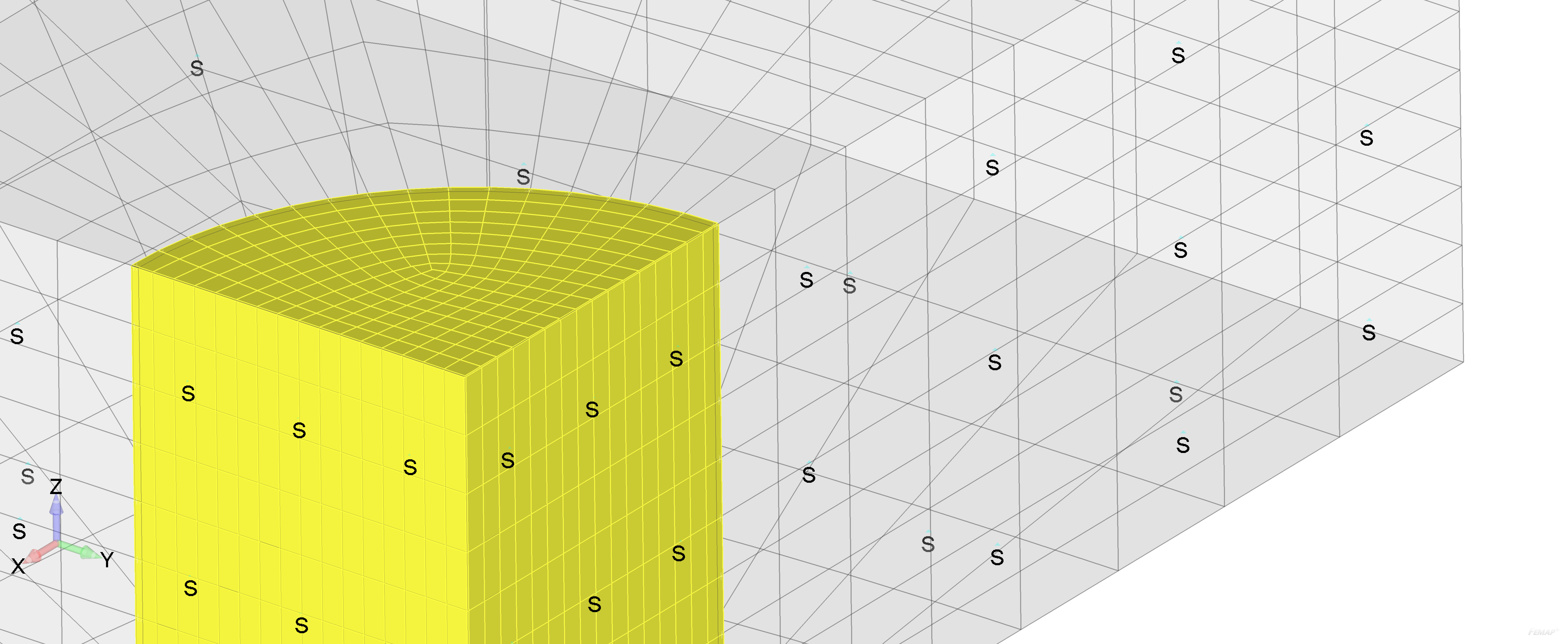
Посадка вала с натягом с использованием элементов GAP
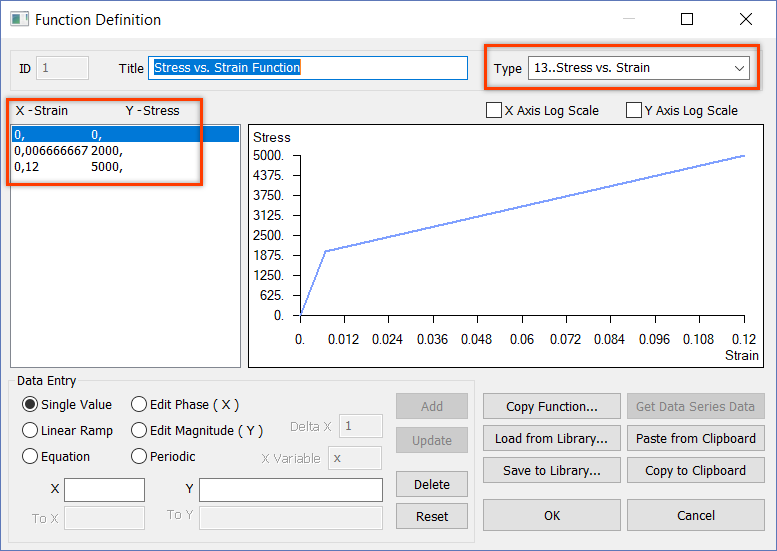
Использование элементов GAP в данной задаче позволяет использовать нелинейную модель материала вала и, соответственно, воспользоваться нелинейным решателем Nastran SOL106.
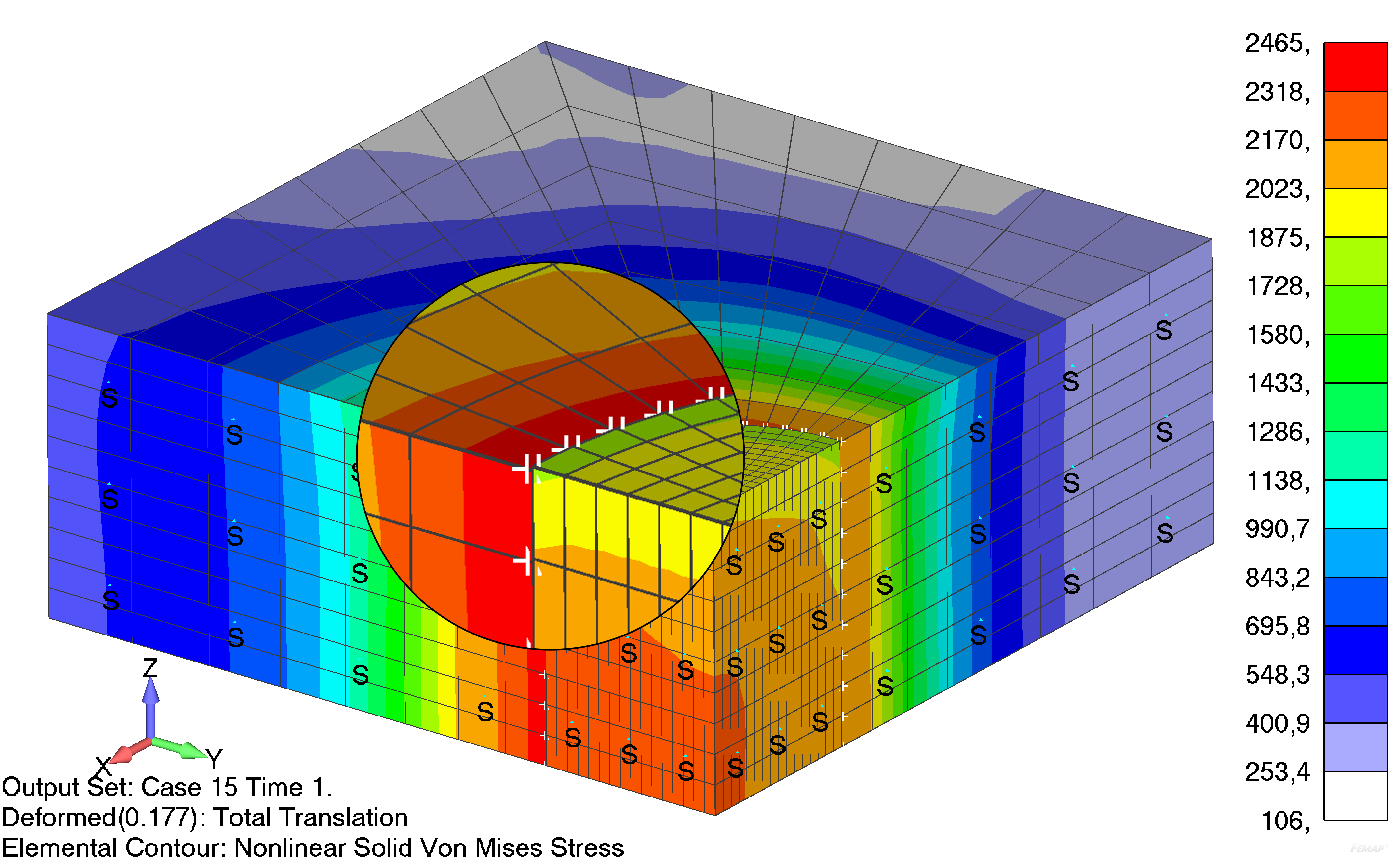
Результаты анализа
• Элементы GAP сработали на сжатие до нулевой длинны, тем самым обеспечили нулевой зазор между валом и телом изделия
• Nastran SOL106 не поддерживает алгоритм линейного контакта типа Contact
- Использование элементов GAP разрешило эту особенность
- В данной задаче можно использовать элементы Slide Line. В этом случае, задавать натяг необходимо через температурные расширения вала
Контактные элементы Slide Line
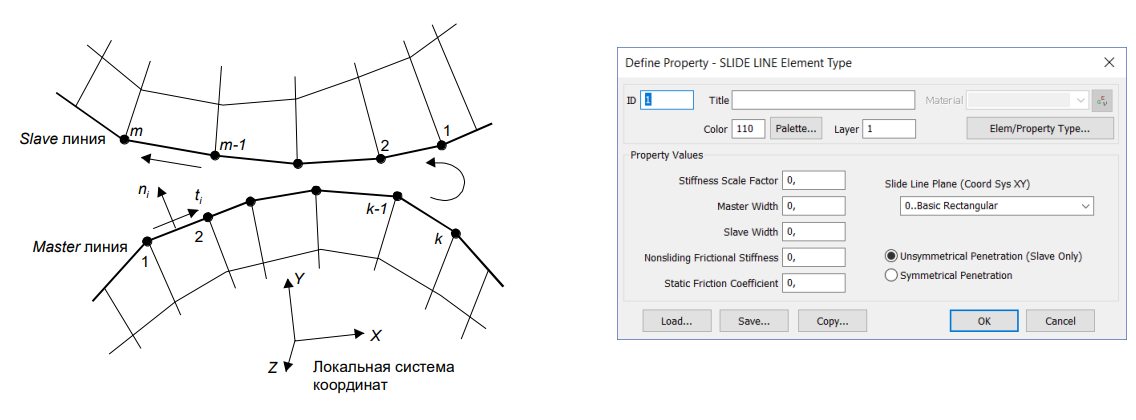
Элемент Slide Line (линия скольжения) позволяет моделировать геометрию контакта между двумя телами. Исходные данные включают описание контактных сегментов в форме ведущих (Master) и подчиненных (Slave) узлов
• Применяется при моделировании поверхностного кусочно-скользящего взаимодействия двух деформируемых тел
• Изображается линиями, соединяющими Master и Slave узлы
• Система координат элемента зависит от системы координат узлов
• Ширина контактных поверхностей (Master Width и Slave Width) и данные о жесткости и фрикционных свойствах контактных поверхностей – масштабный коэффициент жесткости (Stiffness Scale Factor), жесткость контакта до начала скольжения (Nonsliding Frictional Stiffness) и коэффициент статического трения (Static Friction Coefficient).
• При выполнении линейного анализа элементы Slide Line игнорируются. В FEMAP отсутствует интерфейс для отображения результатов по этим элементам
• Для того, чтобы вывести результаты по элементам в текстовый файл с расширением *.f06, необходимо вставить в секцию входного файла Case Control (управление вариантом нагружения) команду BOUTPUT = ALL
• Эта команда служит для задания номеров элементов Slide Line, для которых требуется вывод результатов. После выполнения анализа с этим входным файлом, в конце соответствующего файла *.f06 будет помещен список результатов по элементам Slide Line.
Создание элемента Slide Line
• Аппарат контактного взаимодействия вдоль линий, заданных двумя наборами узлов позволяет моделировать взаимодействие между двумя неформируемыми телами.
• Одно из них назначается ведущим (Master), а другое подчиненным (Slave). Для моделирования взаимодействия между ними требуется задание линий контакта и свойств контакта, которые объединяются в элементе Slide Line.
• Каждая из линий контакта задается двумя наборами узлов – Master узлами и Slave узлами. Соседние узлы линий образуют контактные сегменты.
• В свойствах элемента задаются жесткость и фрикционные свойства в контакте, а также указывается локальная система координат элемента.
• Все контактные сегменты элемента Slide Line должны лежать в плоскости XY локальной системы координат. Локальная система координат элемента может совпадать с глобальной прямоугольной системой координат, но, как правило, для каждого элемента приходится создавать свою систему координат.
• Узлы, задающие линии контакта, должны перечисляться в порядке, определяемом направлением осей локальной системы координат. Направление обхода Master узлов и продолжение обхода Slave узлов должно происходить в направлении поворота оси X к оси Y.
Создание элемента Slide Line
• После создания локальной системы координат элемента создается свойство элемента Slide Line
Свойства элемента Slide Line
• В списке Slide Line Plane (Coord Sys XY) (плоскость XY линии скольжения) следует выбрать систему координат, с которой будет совмещена плоскость XY элемента. В начале расчета программа проверяет, находятся ли все узлы элемента в этой плоскости.
• По умолчанию все остальные поля в этом окне можно оставить незаполненными.
• Выбор одной из опций Unsymmetrical Penetration (Slave Only) (несимметричное проникновение), или Symmetrical Penetration (симметричное проникновение) определяет алгоритм проверки контакта. При несимметричном алгоритме проверяется только проникновение Slave (подчиненных) узлов за линию, заданную Master (ведущими) узлами. Этот алгоритм допускает проникновение Master узлов за Slave линию. В симметричном алгоритме проверяется взаимопроникновение Master и Slave узлов. Очевидно, что второй алгоритм требует больших вычислительных затрат.
• В поле Stiffness Scale Factor задается масштабный коэффициент жесткости, который используется при вычислении силы контактного взаимодействия в зависимости от глубины проникновения. По умолчанию, если задано нулевое значение, коэффициент жесткости устанавливается равным 1.0. Его величина обычно уменьшается для улучшения сходимости процесса решения.
• В полях Master Width и Slave Width задается ширина контактных поверхностей, которые используются при вычислении контактных напряжений.
Свойства элемента Slide Line
• В поле Nonsliding Frictional Stiffness задается жесткость контакта до начала скольжения. Это значение должно назначаться с осторожностью. Жесткость контакта определяет относительные перемещения узлов в контакте, вызванные силой трения, до начала скольжения. Эти относительные перемещения должны быть меньше ожидаемых перемещений после начала скольжения. Большие значения жесткости контакта могут привести к плохой сходимости, слишком малые значения – к низкой точности решения.
• В поле Static Friction Coefficient задается коэффициент статического трения, который определяет силу, действующую по касательной к линии контакта, в зависимости от нормальной силы в зоне контакта.

• С помощью кнопки Type определятся тип элемента выбором опции Slide Line.
• В списке Property выбирается заранее созданное свойство для элемента этого типа.• В поле ID задается номер элемента или принимается предложенный по умолчанию.
• Кнопкой Palette (палитра) задается цвет элемента.
• Как уже отмечалось, узлы, определяющие контактные линии сегмента, должны лежать в плоскости XY системы координат сегмента, выбранной в списке Slide Line Plane диалогового окна задания свойств. Задание линии ведущих (Master) узлов и линии подчиненных (Slave) узлов осуществляется с помощью кнопок Master Nodes (ведущие узлы) и Slave Nodes (подчиненные узлы).
• При нажатии на одну из этих кнопок появляется стандартное диалоговое окно выбора объектов, с помощью которого нужно выбрать соответствующие узлы. Выбираемые узлы должны следовать в определенном порядке, соответствующем ориентации осей X и Y системы координат сегмента.
• Это требование ограничивает применение операций выбора узлов их перечислением вручную. Для некоторого облегчения выбора можно заранее создать группы (Group), содержащие узлы линий контакта.
Аппарат линейного контакта Connect
В рамках решений линейного статического анализа существует возможность моделирования линейного контактного взаимодействия между поверхностями с помощью аппарата Connect.
Задание контактных поверхностей возможно автоматически либо вручную в пределах заданного диапазона поиска, при этом контактные поверхности подразделяются на Исходные области (Source Region) и Конечные области (Target Region).
Условия контактного взаимодействия между свободными гранями конечных элементов контактирующих поверхностей создаются решателем автоматически после запуска расчетной модели на решение при выполнении следующих условий:
- пересечение свободных граней конечных элементов контактирующих поверхностей;
- длина отрезка нормали между гранями элементов равна либо меньше значения, соответствующего диапазону поиска
В отличие от нелинейного контакта, где пары контактирующих элементов переопределяются на каждой итерации, при решении линейной статической задачи создание пар происходит один раз в начале расчета без дальнейшего обновления.
Основы линейного контакта
В процессе выполнения контактного алгоритма используются следующие соотношения:
• Кинематические уравнения – описание движения поверхностей относительно друг друга;
• Условия линейного контакта;
• Уравнения статического равновесия с учетом добавочной контактной жесткости и контактных сил;
• Преобразование кинематических уравнений и основных уравнений (равновесия и условий контакта) в КЭ терминах.
Решение алгоритма линейного контакта завершается и считается сошедшимся при следующих условиях:
• Выполнение условия сходимости по параметру CTOL и количество изменений статусов контактных элементов не
превышает заданного порогового значения параметра NCHG;
• Количество шагов «внешнего» цикла достигло максимального числа итераций (MAXS), заданного в настройках для
«внешнего» цикла.
Основы линейного контакта
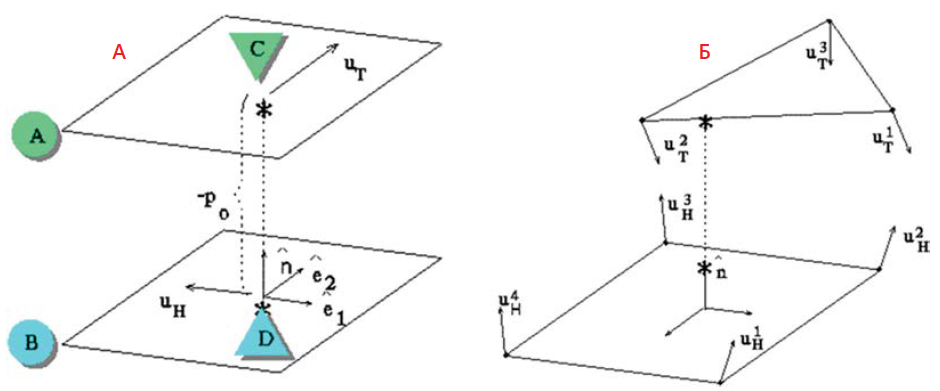
На рисунке условно представлены свободные грани элементов целевой (А) и исходной (В) поверхностей. В ходе деформации исследуемой модели происходит движение точки исходной грани (воздействующая точка – D) относительно целевой грани. В процессе решения через воздействующую точку D строятся три взаимно перпендикулярных единичных вектора: тангенциальные е1 и е2, а также направленный по нормали к исходной грани вектор n. Точка пересечения нормального вектора n с целевой гранью является целевой точкой С. При выполнении контактного алгоритма предполагается, что проникновение воздействующей точки в целевую грань происходит в целевой точке C.
Величина проникновения определяется по следующему выражению:
p = p0 + (uh – ut)n
где p0 – начальное проникновение, обусловленное
исходной недеформированной геометрией;
uh – перемещение (движение) воздействующей точки D;
ut – перемещение (движение) целевой точки С.
Алгоритм решения линейного контактного взаимодействия
Решение алгоритма линейного контакта делится на два итерационных цикла – «внешний» и «внутренний». «Внешний» цикл – цикл определения статуса контактных элементов. «Внутренний» цикл – цикл итераций обновления контактных усилий для выполнения условия нулевого проникновения для всех активных контактных элементов.
1. Создание контактных элементов на основе указанных пользователем областей и заданного диапазона поиска.
2. Расчет жесткостных характеристик элементов, включая штрафные жесткости контактных элементов.
3. Определение знаков сил взаимодействия элементов с учетом граничных условий и приложенных нагрузок.
4. Запуск «внешнего» цикла – определение статуса контактных элементов в зависимости от взаимопроникновения и контактного усилия.
5. Добавление контактной жесткости к глобальной матрице жесткости активных контактных элементов.
6. Запуск «внутреннего» цикла. На каждой итерации «внутреннего» цикла определяется проникновение в контактных парах, на основе которого по выражению в соответствии с заданными нормальным (PENN) и касательным (PENT) значениями штрафной функции вычисляются контактные силы для следующей итерации. Завершение «внутреннего» цикла происходит либо при достижении максимально допустимого числа итераций (MAXF), либо при выполнении условия сходимости контактных сил – изменение контактных сил на предыдущей и последующей итерациях не превышает значения параметра CTOL. После чего осуществляется возврат на «внешний» цикл.
7. На «внешнем» цикле алгоритма на основе расчета контактных сил на «внутреннем» цикле происходит следующее обновление статуса (активация/деактивация) контактных элементов. В случае если обнаруживается проникновение неактивных контактных элементов, то их статус меняется на активный. В результате определяется новый набор активных контактных элементов и заново запускается «внутренний» цикл алгоритма.
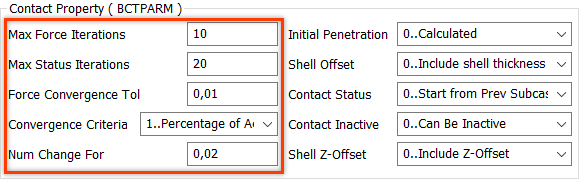
Параметры линейного контакта
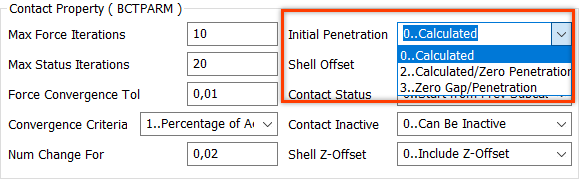
Начальное проникновение Initial Penetration (INIPENE) контролирует начальное состояние контактирующих поверхностей. Применение данного параметра полезно, когда контактирующие поверхности криволинейные, а конечно-элементная аппроксимация геометрии приводит к тому, что узлы элементов не принадлежат точно поверхности.
Это, в свою очередь, может привести к наличию локальных точек с повышенными значениями контактного давления вместо равномерного сглаженного распределения.
Рассмотрим возможные варианты:
• 0..Calculated – используется по умолчанию: учет всех зазоров и проникновений на основе координат узлов конечных элементов. Данный параметр удобно использовать для моделирования контактного взаимодействия с учетом преднатяга при специально заданном проникновении одного тела в другое;
• 2..Calculated/Zero Penetrations – все проникновения будут обработаны как соприкосновения.
• 3..Zero Gap/Penetration – в диапазоне поиска все зазоры и проникновения будут обработаны как соприкосновения.
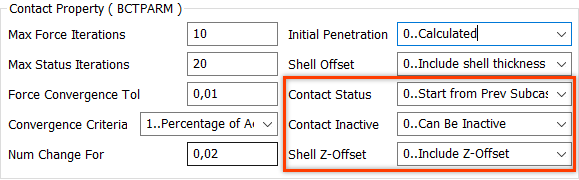
Включить Z-смещение элемента оболочки 0..Include shell thickness Offset (ZOFFSET) – при расчете контактного взаимодействия в расчет будут взяты параметры смещения, заданные для 2D оболочечных элементов;
Все контактные элементы могут стать неактивными 0..Can Be Inactive (CSTRAT) – при выборе вероятность сокращена программным обеспечением позволяет снизить вероятность появления сингулярности из-за деактивации всех контактных пар.
Состояние контакта Contact Status (RESET) – используется при наличии в решении нескольких расчетных случаев. Для сокращения времени счета можно для первого шага «внешнего» цикла использовать результаты статусов контактных пар, полученные при решении первого расчетного случая, этому соответствует параметр 0..Start from Prev Subcase. В случае выбора 1..Start from Init State для каждого расчетного случая определение статуса контактных элементов будет происходить заново;
Исходя из практики, значения параметров линейного контакта, заданные по умолчанию, являются подходящими для решения большинства задач.
• Для установки параметров линейного контакта по умолчанию, нажмите кнопку Defaults.
Force Convergence Tol (CTOL) – критерий сходимости контактной силы, определяемый по разности контактных сил на предыдущей и последующей итерациях «внутреннего» цикла алгоритма линейного контакта. Решение «внутреннего» цикла считается сошедшимся, если разность контактных сил меньше значения CTOL;
Max Force Iterations (MAXF) – максимально допустимое число итерации на «внутреннем» цикле контактного алгоритма;
Convergence Criteria и Num For Convergence - определяет формат критерия сходимости NCHG для «внешнего» цикла. В зависимости от выбранного формата изменяется название критерия NCHG:
• Число изменений контакта 0..Number of Changes (NCHG) – допустимое число изменений контактов – задается целое число, то есть определяется допустимое значение изменений статусов контактных элементов. В этом случае значение критерия допустимого количества изменений контактных статусов неизменно от шага к шагу «внешнего» цикла и равно заданному в поле значению.
• Процент от активных элементов контакта 1..Percentage of Active– задается число меньше 1, то есть определяется в долях от количества активных контактных элементов. В этом случае на каждом шаге «внешнего» цикла значение критерия допустимого количества изменений контактных статусов будет разное, так как оно будет вычисляться с использованием количества контактных пар с активным статусом;
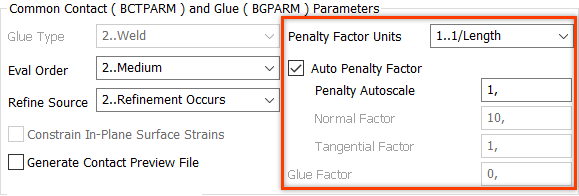
Штрафные коэффициенты единиц Penalty Factor Units (PENTYP) - единица измерения штрафных функций:
• 1/Length – используется по умолчанию, в этом случае контактная жесткость элемента вычисляется по выражению:
• Kcont = e · E · dA, где е – PENN или PENT; E – модуль упругости материала контактирующих тел; dA – площадь.
• Force/(Length х Area)) – эквивалентно отношению жесткости пружины к площади, в этом случае контактная жесткость элемента вычисляется по выражению Kcont = e · dA.
Штрафное направление нормали Normal Factor (PENN) – нормальная составляющая штрафной функции;
Штрафное направление касательной Tangential Factor (PENT) – тангенциальная составляющая штрафной функции;
Оптимизация сетки исходной области Refine Source (REFINE) – перестроение конечно-элементной сетки контактной поверхности в процессе выполнения алгоритма для создания наиболее подходящего разбиения;
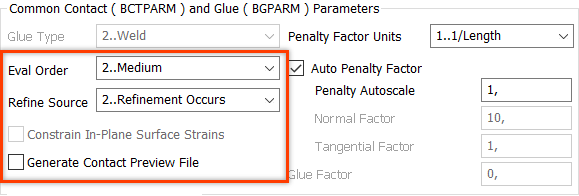
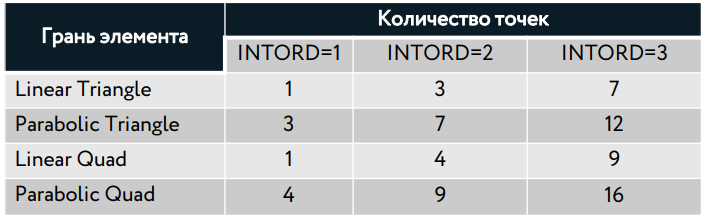
Число точек контакта для расчета Eval Order (INTORD) – задается количество точек на одной грани элемента исходной поверхности для расчета контакта. Большее значение точек расчета позволяет получить более точные результаты, но, соответственно, время вычислительного процесса увеличивается.
Данное количество точек зависит от значения параметра INTORD и типа грани элемента.
Рекомендации при решении линейного контакта
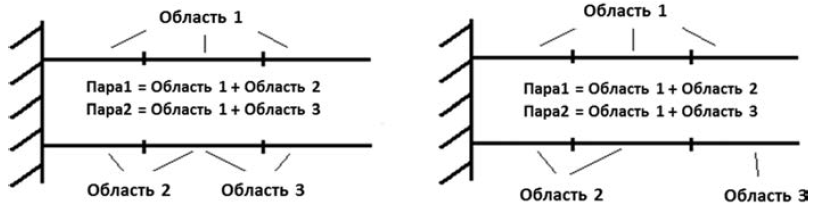
При формировании контактного элемента (контактной пары граней элементов) из каждой свободной грани конечного элемента исходной поверхности опускается нормаль на грань элемента целевой поверхности. Поэтому когда на один элемент исходной поверхности приходится несколько элементов целевой поверхности, создается один контактный элемент. Когда одному элементу целевой поверхности соответствует несколько элементов исходной поверхности, будет создано несколько контактных элементов. Таким образом, для точного описания контактного взаимодействия рекомендуется, чтобы характерный размер КЭ сетки исходной поверхности был меньше, чем целевой.

При задании контактных областей на сложной (ломаной) геометрии следует создавать несколько контактных пар
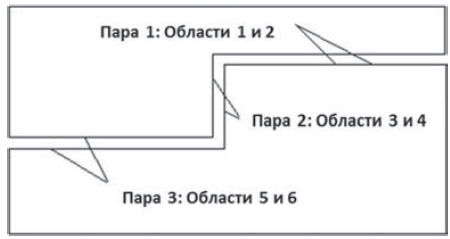
При выборе контактирующих областей не рекомендуется использовать одну грань элемента для нескольких контактных зон. На первом приведен пример, в котором контактные области 2 и 3 имеют общую грань элемента. В некоторых ситуациях это может привести к увеличению времени счета. Для данного случая лучше воспользоваться заданием контактных областей, как показано на втором рисунке.
Решение контактных задач
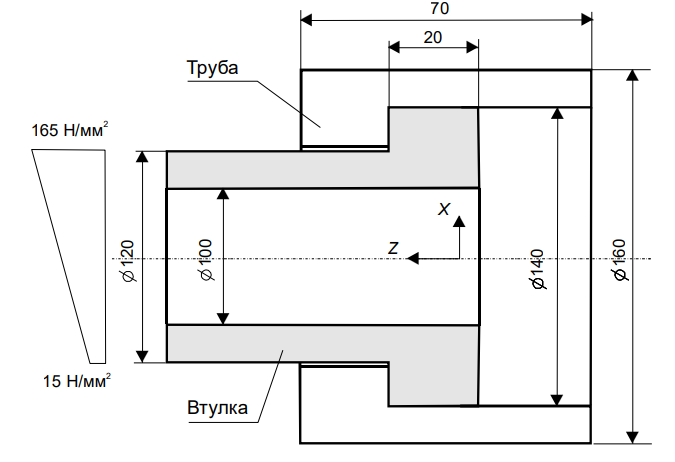
Моделирование контакта трубы и втулки элементами Slide
• Для моделирования условий контакта в программе NASTRAN используются элементы GAP и элементы Slide Line.
• При работе с контактными элементами необходимо хорошее понимание особенностей их работы. Каждый из этих элементов имеет свои достоинства и недостатки, связанные с проблемами при создании большого количества элементов, и плохой сходимостью, которая проявляется при недостаточной тщательности подготовки модели.
Моделирование контакта трубы и втулки элементами Slide
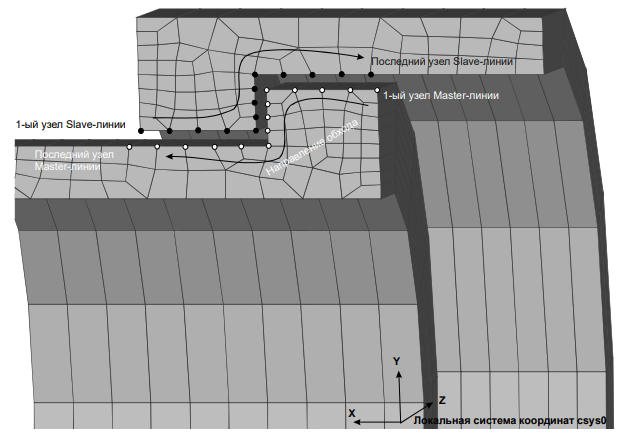
1. Элементы Slide Line будем располагать в радиальных плоскостях, поэтому перед их созданием необходимо задать 9 локальных систем координат: csys0, csys1,…, csys8 (по числу сечений в окружном направлении). Плоскость первой системы координат будет совпадать с плоскостью ZX глобальной системы координат (ось направлена вдоль оси Z). Остальные создаются поворотом первой системы вокруг оси Z на угол 22.5 , 45 , … и т.д.
2. Создадим 9 свойств Slide Line элементов. В списке Slide Line Plane для каждого свойства выберем соответствующую систему координат: csys0, csys1,…, csys8. В полях Master Width и Slave Width зададим ширину ведущих и подчиненных контактных поверхностей. Для элементов, лежащих в плоскости симметрии зададим ширину 0.5 (рис. 13.2), для остальных семи элементов – 1.0. При таких значениях ширины контактных поверхностей в результатах по элементам Slide Line будут вычисляться нормальные погонные усилия вдоль линии контакта. Остальные параметры оставим по умолчанию, в том числе опцию несимметричного контроля контакта – Unsymmetrical Penetration (Slave Only)=Yes.
3. Для того, чтобы при перечислении Master и Slave узлов их было удобно выбирать, масштабируем элементы втулки относительно точки {0,0,0} с множителями Scale Factor=0.97
4. Создадим первый Slide Line элемент в плоскости XZ, и назначим для него свойство с локальной системой координат c0
5. Для создания еще восьми элементов скопируем первый Slide Line элемент поворотом
Моделирование контакта трубы и втулки элементами Slide Line
После операции копирования необходимо воспользоваться командой Modify Edit Elements для того, чтобы модифицировать свойства у вновь созданных элементов Slide Line. Элементы, полученные таким способом, не будут иметь общих узлов с конечноэлементной моделью, но зато будут иметь Master и Slave узлы, заданные в надлежащем порядке. Чтобы слить совпадающие узлы конечно-элементной модели и Slide Line элементов, выполним команду Tools Check Coincident Nodes. В данном случае масштабирование элементов втулки дает возможность выполнить эту операцию так, что Master узлы будут сливаться с узлами втулки, а Slave узлы – с узлами трубы. Снова выполним масштабирование элементов втулки с множителем 1/0.97.
Задание закреплений и нагрузок
1. Закрепим узлы трубы на торце по оси Z.
2. Зададим условия симметрии, закрепив все узлы, лежащие в плоскости XZ, по оси Y.
3. Исключим перемещение твердого тела, закрепив нижний узел на торце трубы по оси X.
4. Нагрузки будем прикладывать в виде переменного давления на поверхность торца втулки.
5. Femap не помещает во входной файл команду получения результатов для элементов Slide Line. Поэтому, для получения и анализа результатов нужно в секцию Case Control Section (секция управления вариантами расчета) вставить запись: “BOUTPUT = All”, определяющую список контактных элементов, для которых будут выводиться результаты в файл с расширением *.f06.
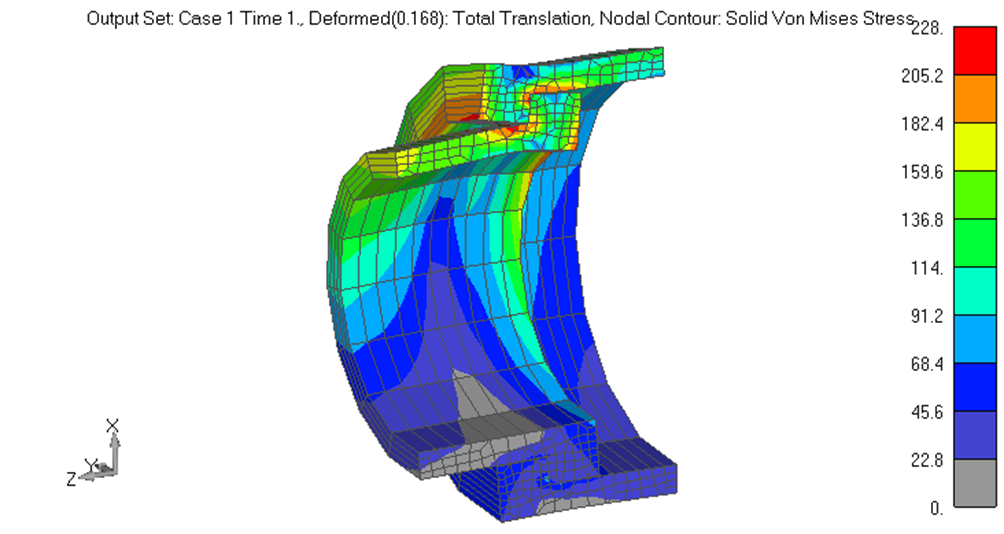
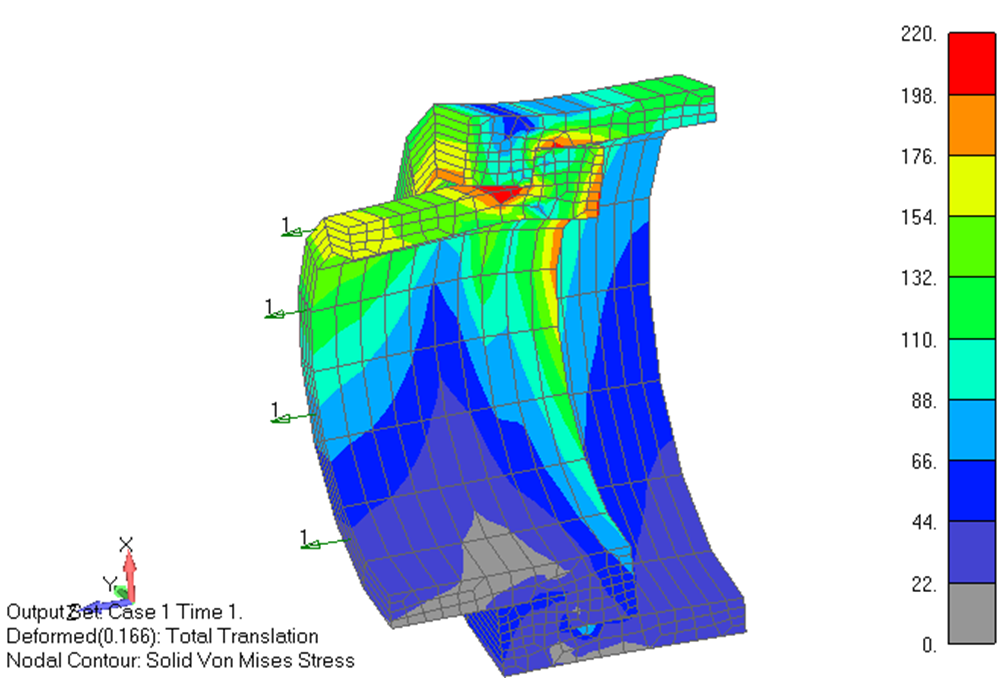
Результаты расчета в виде деформированного состояния с коэффициентом увеличения деформаций в 50 раз, и распределения эквивалентных напряжений

.svg)





























.jpg)
.jpg)


